 首页
首页
0/100
湖南 长沙6ES7901-0BF00-0AA0西门子详细使用说明
来自:长沙玥励自动化设备有限公司
10人民币
发布时间:2019-4-26
关注次数:118
产品参数
商品详情
湖南 长沙 西门子 6ES7901-0BF00-0AA0 详细使用说明

PTO向导移植
S7-200 PTO向导移植至 S7-200 SMART 运动控制,移植时需要在 S7-200 SMART 中重新运行运动控制向导编程。
S7-200 SMART 运动控制向导的测量系统选择相对脉冲,如图1所示:

图1. 选择测量系统
S7-200 SMART 运动控制向导的方向控制根据实际情况可以选择“单相(1个输出)”或者“单相(2个输出)”,“单相(2个输出)”有方向控制,如图2所示:

图2. 选择方向控制
CTRL 指令移植
PTOx_CTRL 指令由 AXISx_CTRL 指令替换,如图3所示:
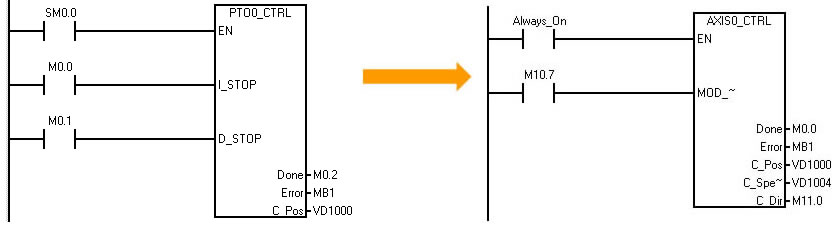
图3. CTRL指令移植
1、I_STOP参数,在S7-200 SMART运动控制向导中根据实际情况启用LMT+(正限位)、LMT-(负限位)、STP(停止点)DI点,选择响应为“立即停止”,如图4所示。如果立即停止为内部变量,可以将该内部变量通过DO点控制DI点实现。

图4. 立即停止
2、D_STOP参数,在S7-200 SMART运动控制向导中根据实际情况启用LMT+(正限位)、LMT-(负限位)、STP(停止点)DI点,选择响应为“减速停止”,如图5所示。如果减速停止为内部变量,可以使用MOD_EN参数替换。

图5. 减速停止
MAN 指令移植
PTOx_MAN 指令由 AXISx_MAN 指令替换,如图6所示:

图6. MAN指令移植
1、同一时刻仅能启用RUN、JOG_P或JOG_N中的一个命令;
2、如果改变方向需先改变Dir参数再启用RUN,Dir=0时为正向。
RUN 指令移植
PTOx_RUN指令由AXISx_RUN指令替换,如图7所示:

图7. RUN指令移植
1、S7-200最多25个包络,每个包络最多29步,S7-200 SMART 最多32个包络,每个包络最多16步;
2、S7-200包络定义为“单速连续旋转”且使用PTOx_ADV指令后继续发送指定脉冲停止功能,在S7-200 SMART 可以使用RPS输入点停止,可以通过DO点控制RPS输入点实现,如图8所示:

图8. PTOx_ADV 功能移植
LDPOS 指令移植
PTOx_LDPOS 指令由 AXISx_LDPOS 指令替换,如图9所示:

图9. PTOx_LDPOS 指令移植
MAP库移植
S7-200 MAP 库移植至 S7-200 SMART 运动控制,移植时需要在 S7-200 SMART 中通过运动控制向导编程。
测量系统移植
1、如果 MAP 库使用相对脉冲,S7-200 SMART 运动控制向导的测量系统选择相对脉冲,如图1:

图1. 选择测量系统
2、S7-200 SMART 运动控制向导的方向控制根据实际情况可以选择“单相(1个输出)”或者“单相(2个输出)”,如图2:

图2. 选择方向控制
3、如果 MAP 库使用工程量,S7-200 SMART 运动控制向导的测量系统选择工程单位,如图3所示:

图3. Scale_EU_Pulse指令移植
4、最大速度和启动/停止速度在S7-200 SMART运动控制向导中设置,如图4所示:

图4. 最大速度
5、加减速时间在 S7-200 SMART 运动控制向导中设置,如图5所示:

图5. 加减速时间
CTRL指令移植
Q0_X_CTRL指令由AXISx_CTRL指令替换,如图6所示:

图6. CTRL指令移植
启动/停止速度、最大速度、加减速时间、正限位和负限位,在S7-200 SMART 运动控制向导中设置。
MoveVelocity指令移植
1、使用 Q0_X_MoveVelocity 指令,在运动过程中修改速度,由 AXISx_MAN 指令替换,如图7所示:

图7. MoveVelocity指令移植
2、使用 Q0_X_MoveVelocity 指令,在运动过程中不需要修改速度,由 AXISx_MAN 指令或者 AXISx_GOTO 指令(正向模式2,反向模式3)替换,如图8所示:

图8. MoveVelocity 指令移植
MoveAbsolute 指令移植
Q0_X_MoveAbsolute 指令由 AXISx_GOTO 指令(模式0)替换,如图9所示:

图9. MoveAbsolute指令移植
MoveRelative 指令移植
Q0_X_MoveRelative 指令由 AXISx_GOTO 指令(模式1)替换,如图10所示:

图10. MoveRelative 指令移植
Q0_X_MoveRelative 指令的方向 Direction(0=反向、1=正向),AXISx_GOTO 指令的 Pos 正数为正向、负数为反向。
Home 指令移植
Q0_X_Home 指令由 AXISx_RSEEK 指令替换,如图11所示:

图11. Q0_X_Home 指令移植
1、Q0_X_Home 指令的 Start_Dir、Final_Dir、Homing_Slow_Spd、Homing_Fast_Spd 需要在 S7-200 SMART 运动控制向导中设置,如图12所示:

图12. S7-200 SMART 运动控制向导方向、速度设置
2、Q0_X_Home 指令的 Position 需要在 S7-200 SMART 运动控制向导中设置参考点偏移量,如图13所示:

图13. S7-200 SMART 运动控制向导设置参考点偏移量
3、需要在 S7-200 SMART 运动控制向导中设置搜索顺序为1,如图14所示:

图14. S7-200 SMART 运动控制向导设置搜索顺序
LDPOS 指令移植
Q0_X_LoadPos 指令由 AXISx_LDPOS 指令替换,如图15:

EM253移植
S7-200 EM253 移植至 S7-200 SMART 时,硬件差异很大(如表1),因此移植时伺服驱动器需要与 S7-200 SMART 匹配。
表1.S7-200 EM253与S7-200 SMART硬件差异
| 序号 | 内容 | EM253 | S7-200 SMART |
| 1 | 电压等级 | 5V、12V、24V及5V差分 | 24V |
| 2 | 频率 | 最高200KHz | 最高100KHz |
| 3 | 输出 | 漏型输出和差分输出 | 源型输出 |
指令移植
S7-200 EM253向导移植至S7-200 SMART运动控制,移植时需要在S7-200 SMART中重新运行向导编程。
EM253的运动控制指令与S7-200 SMART运动控制指令功能区别很小,按照表2对应关系移植:
表2.S7-200 EM253移植至S7-200 SMART指令对应关系
| 序号 | EM253 | S7-200 SMART |
| 1 | POSx_CTRL | AXISx_CTRL |
| 2 | POSx_MAN | AXISx_MAN |
| 3 | POSx_GOTO | AXISx_GOTO |
| 4 | POSx_RUN | AXISx_RUN |
| 5 | POSx_RSEEK | AXISx_RSEEK |
| 6 | POSx_LDOFF | AXISx_LDOFF |
| 7 | POSx_LDPOS | AXISx_LDPOS |
| 8 | POSx_SRATE | AXISx_SRATE |
| 9 | POSx_DIS | AXISx_DIS |
| 10 | POSx_CLR | 无相关指令,使用Q点编程50ms脉冲实现 |
| 11 | POSx_CFG | AXISx_CFG |
PWM移植
S7-200 PWM向导移植至S7-200 SMART PWM,移植时需要在S7-200 SMART中重新运行PWM向导编程。
PWM向导移植
S7-200 PWM 向导移植至S7-200 SMART PWM,移植时需要在 S7-200 SMART中 重新运行PWM向导编程,如图1所示:

图1. PWM向导移植
在S7-200 SMART 中重新调用向导生成的 PWMx_RUN 子程序,如图2所示:

图2. PWMx_RUN子程序移植
PWM 指令移植
S7-200 与 S7-200 SMART 使用PLS指令控制脉宽调制(PWM)的SM 定义不同,如表1所示,不能将 S7-200 CPU 编写的 PLS指令程序直接用于S7-200 SMART。
表1.S7-200 与 S7-200 SMART 的SM 对比
| Q0.0 | S7-200 | S7-200 SMART |
| SM67.0 | PWM更新周期 | PWM更新周期 |
| SM67.1 | PWM更新脉宽 | PWM更新脉宽 |
| SM67.2 | 未使用 | 未使用 |
| SM67.3 | PWM时间基准:0=1μs,1=1ms | PWM时间基准:0=1μs,1=1ms |
| SM67.4 | PWM更新:0=异步,1=同步 | 未使用 |
| SM67.5 | 未使用 | 未使用 |
| SM67.6 | PTO/PWM模式选择:0=PTO,1=PWM | PTO/PWM模式选择:0=PWM,1=PTO |
| SM67.7 | PWM启用:0=禁止,1=启用 | PWM启用:0=禁止,1=启用 |
![]() S7-200 SMART 只能使用同步更新更改 PWM 波形的特性。
S7-200 SMART 只能使用同步更新更改 PWM 波形的特性。
使用 STEP 7 Micro/Win SMART 打开S7-200 CPU 的 PLS 指令程序需修改控制字SM67.6,如图3所示:

展开
 询盘信息
询盘信息
必填*
-
姓名:

-
联系手机:
-
需求量:
选填
-
固话电话:
-
联系邮箱:
-
所在单位:
所咨询的内容:

我想了解:《湖南 长沙6ES7901-0BF00-0AA0西门子详细使用说明》的详细信息.请商家尽快与我联系。
完成
咨询内容
完成
完成
