 首页
首页
0/100

西门子6ES72221HF220XA8介绍
来自:上海朕锌电气设备有限公司
面议
发布时间:2018-1-2
关注次数:185
产品参数
商品详情
西门子6ES72221HF220XA8介绍
西门子6ES72221HF220XA8介绍
SIMATIC S7-200 CN,Digitalausg. EM 222,仅 用于 S7-22X CPU, 8DA(继电器输入端),2A 这些知识 S7-200 CN 产品 具有 仅 CE 批准
_______________________
SIEMENS(西门子销售中心)
上海朕锌电气设备有限公司
联系人:万紫云(销售经理)
手 机:15021699383(微信同步)
Q Q:2779823058 zx-plc.com )
座 机:021-31668149
______________________________________
(SIEMENS) 诚信走天下,走遍天下有朋友;虚伪的人,踏破铁鞋无知己。
上海朕锌电气设备有限公司是一家专业从事西门子工业自动化产品和数控系统销售、技术服务及培训的工程服务公司。
销售代理西门子WINCC组态软件,西门子PLC编程软件,西门子PLC,S7-200CN/S7-200/S7-300/S7-400/S7-1200/(6ES7/6GK/6AV/6FC/6SN/6FX/6SE/6RA/6DD/7ML/7MH/7KM/7MF/3RV/3RH/3TF)西门子PROFIBUS-DP总线,RS485总线接头,CP网卡,变频器,触摸屏,低压电器,数控伺服备件。
ET200S 1 步进模板使用入门
ET200S 1 5V/204KHz 步进模板入门
1. 模板介绍
1.1 总览
ET200S 1 步进模板输出脉冲来控制步进电机 ,输出脉冲的数量决定步进电机的运动距离,输出脉冲的频率决定步进电机的速度。
模板订货号: 6ES7138-4DC00-0AB0
1.2 模板参数
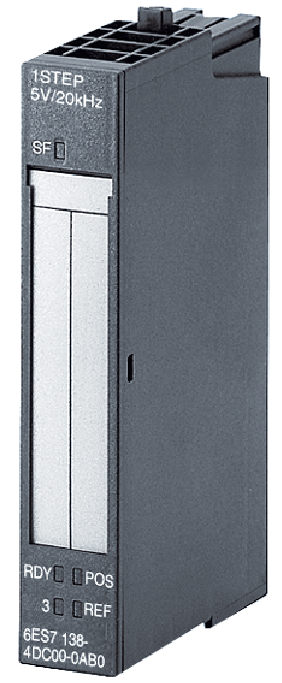
图. 1: 步进电机模板
- 1 通道,可控制1个步进电机
- 数字量输入的参考点开关
- 外部停止或者外部脉冲使能数字输入
- 脉冲和方向信号时RS422的差分输出模式
- 最大输出频率: 204kHZ
- 最大脉冲数: 1048575
- 4 LED 状态指示灯
- 2 操作模式:寻找参考点和增量模式
2. 模板接线
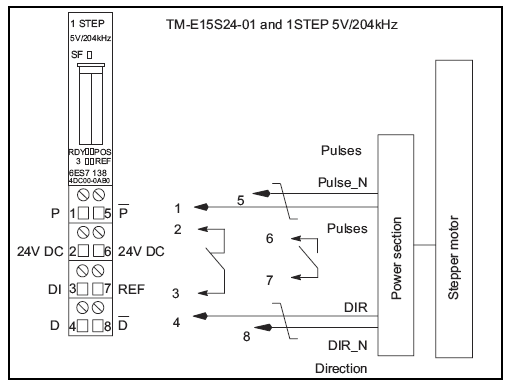
图. 2: 步进模板接线图
- 端子1和5:脉冲差分信号
- 端子4和8:差分输出的方向信号
- 端子2和3:外部停止或者外部脉冲使能数字量输入ID。(功能选择见 4.2 )
- 端子6和7:数字量输入参考点开关
3. 硬件配置
步进模板可以安装在ET 200S接口模板或者 ET200S CPU后面。
本文使用 IM151-7 CPU 为例。

表 1: 软件和硬件配置

图. 3: ET200S 站的配置图
4. 硬件和参数设置
4.1 硬件配置
1) 根据图. 2 和图. 3完成ET200S的接线
2) 打开STEP7,创建一个新项目,并插入一个S7-300站
3) 从硬件目录中选择IM151-7 CPU直接拖拽到站配置窗口
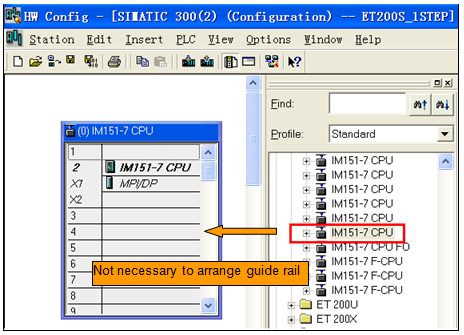
图. 4: 插入IM151-7 CPU
4) 依次在4槽和5槽插入电源模板 PM-E DC24 和步进模块
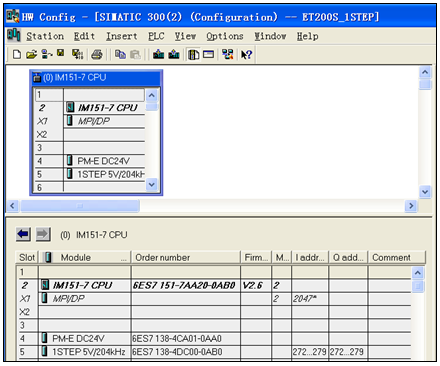
图. 5: 硬件配置
4.2 模板参数配置
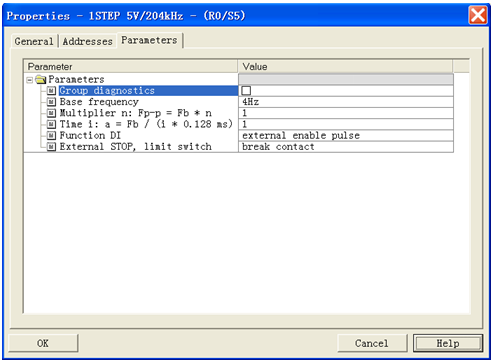
图. 6: 步进模块参数接口
4.2.1 模板参数说明
1) 组诊断:组诊断
2) 基准频率:基准频率,以Hz为单位,标识Fb
3) 增益 n: 增益系数 n,值范围 1-255. 此增益系数决定启动/停止频率 Fss,并且计算公式为: Fss=Fb×n
4) 时间 i: 时间系数 i, 值范围 1-255. 该时间系数以Hz/ms决定加速和减速,计算公式为: a = Fb ×R / (i×0.128 ms)
5)功能 DI: 数字量输入DI 功能可选,可以被组态为外部脉冲输入或者外部停止信号,缺省是外部脉冲且已使能。
6) 外部 Stop, 限位 Stop: 外部 stop, 信号类型停止开关. 接触器触点是常闭信号,以确保该接触器信号,缺省是读取常闭信号。
4.2.2 本文所例参数设置如下
本例参数配置见图. 6.
1) 没有激活组诊断
2) 基准频率 4Hz
3) 乘法系数 1, 启动/停止频率 4Hz
4) 时间系数 1, 加速/ 减速 31.25 Hz/ms
5) 使能外部输入脉冲
6) 外部输入停止和限位信号为常闭类型
5. 编程
5.1 模板输入/输出地址分配
与其它ET200S功能块类似,1STEP步进模板也通过直接读写I/O地址来对模板进行控制和访问的。
反馈信号 (输入), 占用 8 字节. 如表 2 输入地址分配所示。
控制信号 (输出), 占用 8 字节. 如表 3 输出地址分配所示。
有关输入和输出变量分配的详细信息请参阅 ET200S 位置控制和操作手册。链接如下:
/cs/document/9260790?caller=view&lc=en-WW

表 2: 输入地址分配
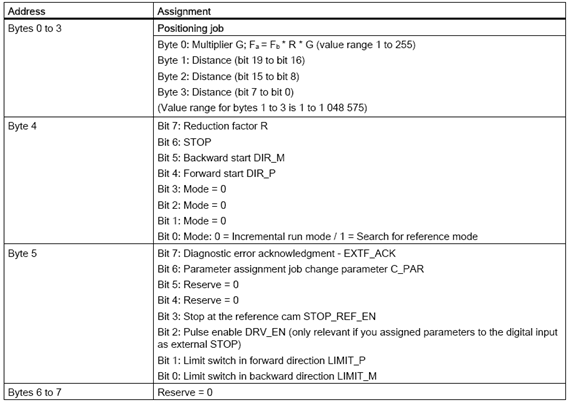
表 3: 输出地址分配
5.2 项目例程
为了更好的实现按位,字节或字对模板进行读写,在梯形图中使用MOVE指令接收输入数据PIB272-PIB279 到MB10-MB17发送MB20-MB27到PQB272-PQB279,对1STEP模板的读写访问均通过MB地址来进行。
1STEP模板地址分配见图. 5

图. 7: 例程编程
6. 模式描述和举例
6.1 Search-for-reference-point 模式
通过执行search-for-reference-point 模式来同步轴, 即.在机械零位和电气零位之间创建连接关系。
6.1.1 Search-for-reference-point 模式
Mode=1
参考点按照常开信号访问
搜寻参考点输出频率 Fss 和 Fa。
Fss 启动停止频率,见章节 4.2.1相关描述。
Fa 输出频率: Fa = Fb ×G × R
Fb: 基准频率. 在1STEP 模板参数中设置。 见章节 4.2.1相关描述。
增益 G: 增益系数 G. 值范围: 1-255, 参见模板输出地址字节: 0。
减少 R:减少系数 R. 模板输出地址字节4的第7位信号,参见表 3.模板输出地址4.7=0, R=1. 模板输出地址 4.7=0, R=0.1.
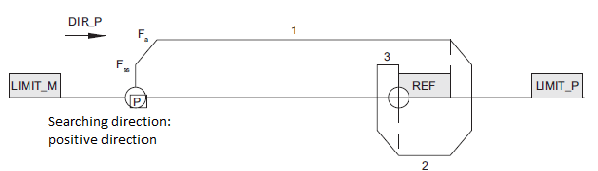
图. 8: 搜寻参考点
6.1.2 search-for-reference-point模式例程
本例模式见图. 8, viz. 搜寻 CW 方向.
-
通过变量表写输出控制变量:

图. 9: 参考点模式控制变量
1) M24.0=1 search-for-reference-point 模式 = 1
2) M25.0=1, M25.1=1: 因为之前的模板参数配置中的限位开关是常闭输入模式,在软件限位信号触发前为信号输入参见章节 4.2.2.
3) M25.2=0: 没有激活软件脉冲使能信号,因之前的模板参数配置中DI已经作为外部脉冲信号使能,内部软件脉冲使能信号在此时不会使用,参见章节 4.2.2.
4) 置位M24.2, 然后复位M24.4 (下降沿有效), 启动search-for-reference-point模式. 输出脉冲频率为 Fa.
5) MB20=1, M24.7=0: 增益系数 G = 1, 减少系数 R = 1, 频率 :
Fa = Fb ×G × R=4Hz×1×1=4Hz。
-
通过变量表读输入状态:

图. 10: 参考点模式变量表
1) M15.2=1: 触发外部脉冲使能信号
2) M15.0 = 1: 驱动使能
3) 之后 search-for-reference point启动, M14.0=1 位置被激活, M15.7=1 位置被执行. 等待参考点开关信号 M15.1.
4) M15.1=1: 参考点信号到达, 寻找参考点已完成 M14.4=1,同步操作完成, M14.2=1,位置到达, M15.3=1, 寻找参考点结束。
6.2 增量模式
增量模式是 1STEP 的主要操作模式. 该操作模式可控制步进电机移动按照设定速度移动到一个指定位置。
6.2.1 增量模式描述
Mode=0
输出脉冲的数量决定步进电机的移动距离,最大值脉冲值为 1048575.
输出脉冲频率决定步进电机速度。
在增量模式下输出频率: Fss, Fa
方向信号作为启动信号。
注意: 步进电机实际位移取决于脉冲数实际速度取决于脉冲频率,这不是在1STEP模板中设置的。
6.2.2 增量模式例程
-
通过变量表写输出控制信号:

图. 11: 在增量模式下的控制变量
1) M24.0=0 增量模式 = 0
2) M25.0=1、M25.1=1: 因之前的已经配置中限位开关信号为常闭输入模式,在软件限位信号触发前为信号输入参见章节 4.2.2。
3) MB20=1, M24.7=0:增益系数 G = 1, 减少系数 R = 1, 输出频率Fa
Fa = Fb ×G × R=4Hz×1×1=4Hz.
4) 脉冲输出数: 通过MB21-23的20 个位信号来存储脉冲数 ,最大值为 0xFFFFF=1048575
MB21 输出脉冲数 (位 16 到位19)
MB22 输出脉冲数 (位 8 到位15)
MB23 输出脉冲数 (位 0 到位 7)
MB21的位 20 到位 23 没有使用
本例中,分配的值为 0 x 100,即. 256 个脉冲。
5) 置位 M24.4, 之后复位 M24.4 (下降沿有效), 启动增量模式 触发CW方向信号开始运动。 -
通过变量表读输入信号:

图. 12: 增量模式变量表
1)增量模式启动后,M14.0=1位置任务被激活,M15.7=1位置被执行。
2) MD10 显示剩余脉冲,如图. 12, 220 个脉冲尚未发出。
3) MD10=0: 脉冲发送完成, 置位 M14.0 和M15.7, 位置到达 M14.2=1 . 增量模式输出完成。
本文介绍步进模板 ET200S 1STEP 的基本操作。有关该模板操作,诊断和技术参数的详细信息, 请参阅手册 "ET 200S 位置操作指令". 描述
西门子840D系统的组成 SINUMERIK840D是由数控及驱动单元(CCU或NCU),MMC,PLC模块三部分组成,由于在集成系统时,总是将SIMODRIVE611D驱动和数控单元(CCU或NCU)并排放在一起,并用设备总线互相连接,因此在说明时将二者划归一处。 ? 人机界面 人机交换界面负责NC数据的输入和显示,它由MMC和OP组成 MMC(Man Machine Communication)包括:OP(Operation panel)单元,MMC,MCP (Machine Control Panel)三部分。MMC实际上就是一台计算机,有自己独立的CPU,还可以带硬盘,带软驱;OP单元正是这台计算机的显示器,而西门子MMC的控制软件也在这台计算机中。 1.MMC 我们最常用的MMC有两种:MMC100.2和MMC103,其中MMC100.2的CPU为486,不能带硬盘;而MMC103的CPU为奔腾,可以带硬盘,一般的,用户为SINUMERIK810D配MMC100.2,而为SINUMERIK840D配MMC103. ※ PCU(PC UNIT)是专门为配合西门子最新的操作面板OP10、OP10S、 OP10C、OP12、 OP15等而开发的MMC模块,目前有三种PCU模块——PCU20、PCU50、PCU70, PCU20对应于MMC100.2,不带硬盘,但可以带软驱;PCU50、PCU70对应于MMC103,可以带硬盘,与MMC不同的是:PCU50的软件是基于WINDOWS NT的。PCU的软件被称作HMI, HMI有分为两种:嵌入式HMI和高级HMI。一般标准供货时,PCU20装载的是嵌入式 HMI,而PCU50和PCU70则装载高级HMI. 2.OP OP单元一般包括一个10.4〞TFT显示屏和一个NC键盘。根据用户不同的要求,西门子为用户选配不同的OP单元,如:OP030,OP031,OP032,OP032S等,其中OP031最为常用MCP是专门为数控机床而配置的,它也是OPI上的一个节点,根据应用场合不同,其布局也不同,目前,有车床版MCP和铣床版MCP两种。对810D和840D,MCP的MPI地址分别为14和6,用MCP后面的S3开关设定。 对于SINUMERIK840D应用了MPI(Multiple Point Interface)总线技术,传输速率为187.5k/秒,OP单元为这个总线构成的网络中的一个节点。为提高人机交互的效率,又有OPI(Operator PanelInterface)总线,它的传输速率为1.5M/秒。 ? 数控及驱动单元 1.NCU数控单元 SINUMERIK840D的数控单元被称为NCU(Numenrical Controlunit)单元:中央控制单元,负责NC所有的功能,机床的逻辑控制,还有和MMC的通讯 它由一个COM CPU板. 一个PLC CPU板和一个DRIVE板组成. 根据选用硬件如CPU芯片等和功能配置的不同,NCU分为NCU561.2,NCU571.2, NCU572.2,NCU573.2(12轴),NCU573.2(31轴)等若干种,同样,NCU单元中也集成SINUMERIK840D数控CPU和SIMATIC PLC CPU芯片,包括相应的数控软件和PLC控制软件,并且带有MPI或Profibus借口,RS232借口,手轮及测量接口,PCMCIA卡插槽等,所不同的是NCU单元很薄,所有的驱动模块均排列在其右侧。 2.数字驱动 ? 数字伺服:运动控制的执行部分,由611D伺服驱动和1FT6(1FK6)电机组成 SINUMERIK840D配置的驱动一般都采用SIMODRIVE611D.它包括两部分:电源模块+驱动模块(功率模块)。 电源模块:主要为NC和给驱动装置提供控制和动力电源,产生母线电压,同时监测电源和模块状态。根据容量不同,凡小于15KW均不带馈入装置,极为U/E电源模块;凡大于15KW均需带馈入装置,记为I/RF电源模块,通过模块上的订货号或标记可识别。 611D数字驱动:是新一代数字控制总线驱动的交流驱动,它分为双轴模块和单轴模块两种,相应的进给伺服电机可采用1FT6或者1FK6系列,编码器信号为1Vpp正弦波,可实现全闭环控制。主轴伺服电机为1PH7系列。
西门子6ES72221HF220XA8介绍
展开
 询盘信息
询盘信息
必填*
-
姓名:

-
联系手机:
-
需求量:
选填
-
固话电话:
-
联系邮箱:
-
所在单位:
所咨询的内容:

我想了解:《西门子6ES72221HF220XA8介绍》的详细信息.请商家尽快与我联系。
完成
咨询内容
完成
完成
