 首页
首页
0/100

供应西门子Siemens 6DD1611-0AE0 MM21
来自:上海斌勤电气技术有限公司
面议
发布时间:2017-6-22
关注次数:119
产品参数
商品详情
供应西门子Siemens 6DD1611-0AE0 MM21
公司现货供应西门子Siemens 6DD1611-0AE0 MM21
希殿电气技术(上海)有限公司(西门子合作伙伴)
联 系 人 :康经理(销售工程师)
在线商务Q Q :192061030
联 系 手 机 :18621061383(微信)
联 系 电 话 :021-60541249
公 司 传 真 :021-57271268
邮 箱 :192061030@qq.com
------------------------------------------
现货供应西门子SIMATIC 6DD开头等一系列产品
公司代理西门子全系列产品为西门子中国总代理西门子工业自动化与驱动技术全系列产品全国一级西门子PLC/触摸屏/变频器/数控/伺服/电源/模块/网卡/电缆/电池/接头/连接器等自动化与驱动技术.
公司所售出的产品,全新原装,质保一年、但凡发现有任何质量问题,可无条件退换(非人为损坏).
SIEMENS 可编程控制器
1、 SIMATIC S7 系列PLC、S7200、s71200、S7300、S7400、ET200、S7-1500
2、 逻辑控制模块 LOGO!230RC、230RCO、230RCL、24RC、24RCL等
3、 SITOP 系列直流电源 24V DC 1.3A、2.5A、3A、5A、10A、20A、40A
4、HMI 触摸屏TD200 TD400C TP177,MP277 MP377SIEMENS 交、直流传动装置
5、 交流变频器 MICROMASTER系列:MM、MM420、MM430、MM440、ECOMIDASTER系列:MDV6SE70系列(FC、VC、SC)
6、全数字直流调速装置 6RA23、6RA24、6RA28、6RA70 系列SIEMENS 数控 伺服
7、840D、802S/C、802SL、828D 801D :6FC5210,6FC6247,6FC5357,6FC5211,6FC5200,6FC5510,
8、伺服驱动 : 6SN1123,6SN1145,6SN1146,6SN1118,6SN1110,6SN1124,6SN1125,6SN1128
9、西门子工业以太网:通讯网卡、通讯电缆、动力电缆、通讯接头、总线连接器、工控机、交换机.
使用直流电压控制器来避免过电压
推荐文档: 西门子工程师推荐本文档!
除了直流制动,复合制动和动态制动几种方法之外,还可以应用直流电压控制器来防止直流母线过电压。当启用直流电压控制器时,输出频率将会被自动修正,从而减弱电动机能量回馈。
1.直流母线过电压:
• 原因:
在电机驱动负载的减速阶段,负载的机械能量将被电机转化为电能反送到变频器的直流母线上。
• 改善方案:
直流电压控制器将制动转矩降至零,从而抑制直流母线的电压有进一步的升高,避免因制动较大负载能量导致过电压而跳闸。
2. 最大直流电压控制器
所需参数设置: P1240, r0056 bit 14
r1242, P1243
P1250-P1254
报警代码: A0502, A0901
故障代码: F0002
功能图代码: FP4600

当使能最大直流电压控制器的功能时,可以有效的控制负载的再生制动现象,避免因F0002故障跳闸。这样输出频率会得到控制,从而减弱电动机能量回馈。
若在变频器以参数P1121中设置的斜坡下降时间快速制动时,变频器将回馈很大的能量,此时,斜坡下降时间将被自动延长,使变频器运行在最大直流电压控制器的接通电平r1242。若直流电压低于最大直流电压控制器的接通电平r1242时,直流电压控制器将会取消延长斜坡下降时间。
如果没有使能最大直流电压控制器,再生制动时,通过报警A0910的方式指示直流母线电压过高,以F0002过电压故障跳闸变频器。如果使能最大直流电压控制器,再生制动时,通过报警A0911指示直流电压控制器被激活。
注意:
1. 自动延长斜坡下降时间是不符合某些行业应用的要求的。例如定位控制和提升机等。
此时,须禁止使能直流母线控制器P1240=0,为了避免直流母线过电压现象,可以采用以下的方法实现:
• 延长斜坡下降时间P1121;
• 使能复合制动P1236和直流制动 P1230。
2. 使用制动电阻时, 为保证制动电阻工作, 须禁止直流母线电压控制器 (P1240=0)
关键词
直流电压控制器; F0002; 过电压
到ISO-工业以太网的PG/PC接口,使用STARTER和DRIVE ES软件路由访问来自PG/PC网络端口的Profibus上的MICROMASTERS
问题:
已经设置了到ISO-工业以太网的PG/PC接口,所以可以使用STARTER和DRIVE ES软件进行路由选择,以访问来自PG或PC网络端口的Profibus总线上的MICROMASTERS。但是发现无法进行通信,该怎么办?
解答:
在硬件配置(以太网CP/CPU/ Profibus CP,带有板载端口的CPU)中仍然支持使用工业以太网进行路由选择。请改变到“TCP/IP”的PG/PC接口以允许使用“路由”通讯。
请查找下面所附的关于解决该问题的步骤。
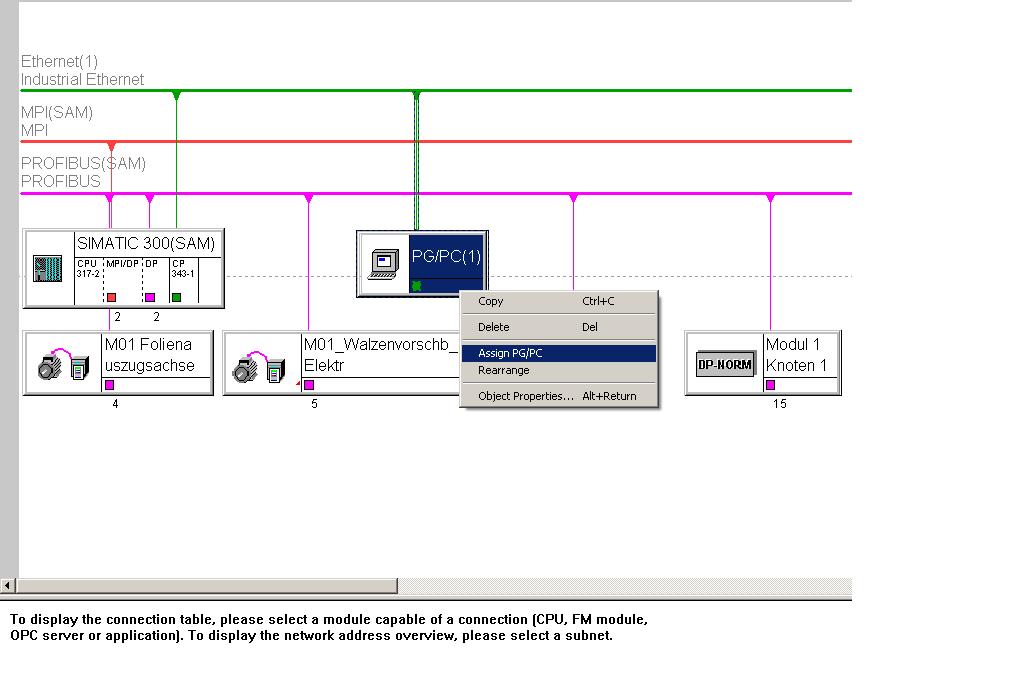
步骤:
确保MICROMASTER和PG/PC按下图所示连接
 ( 70 KB )
( 70 KB )
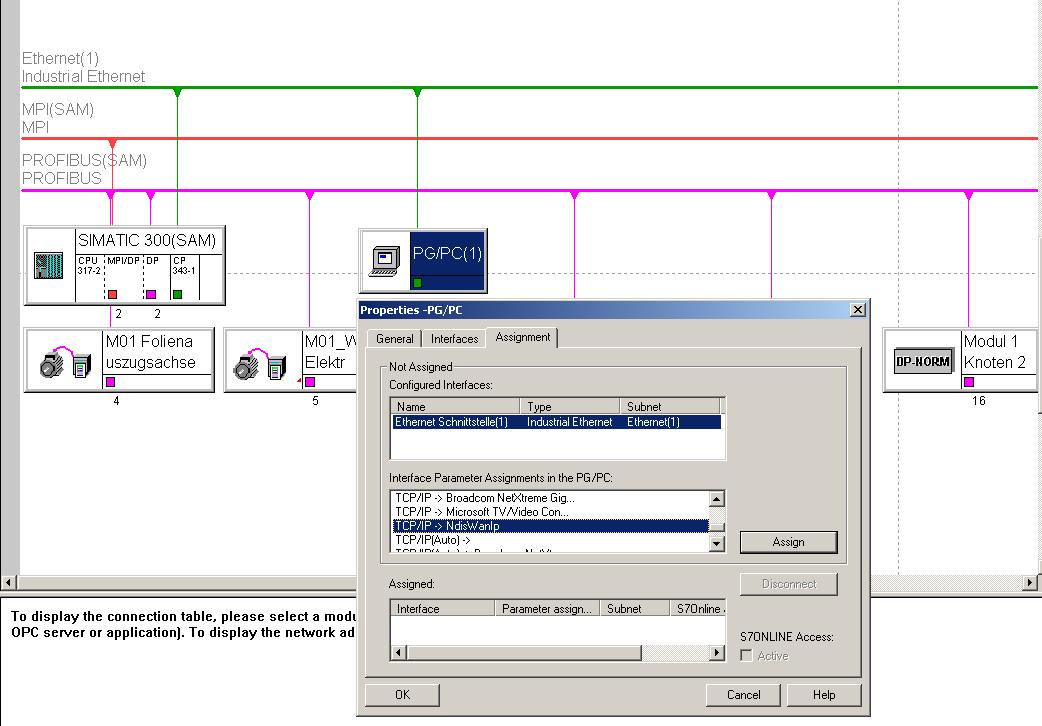
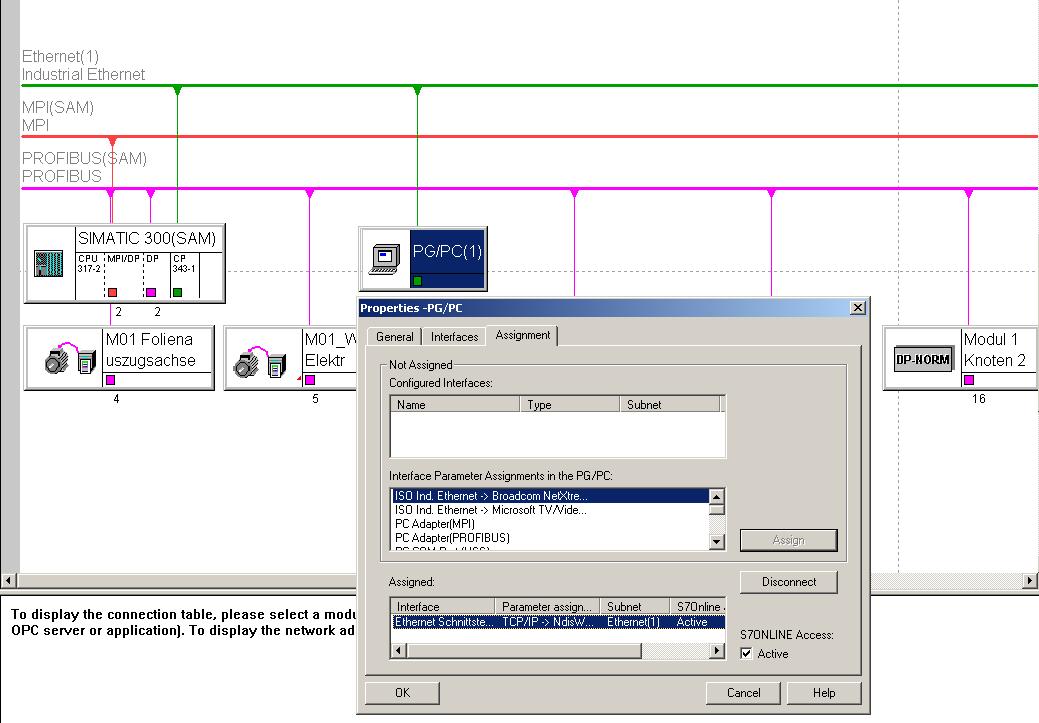
其次,PG/PC必须按接下来的三个屏幕画面中所示的进行赋值分配。
注意事项:请确保“Active”检查标志被设置。
 ( 68 KB )
( 68 KB )
 ( 101 KB )
( 101 KB )
 ( 99 KB )
( 99 KB )
现在ROUTING应该被激活了(黄线所示)
 ( 70 KB )
( 70 KB )
由A&D SD CST写入
MICROMASTER 4和SINAMICS G120编码器的区别
推荐文档: 西门子工程师推荐本文档!
问题:
G120和MM4变频器编码器检测方法的区别是什么?
回答:
G120编码器检测方法较之MM440有一定的提高。
脉冲检测电路现在对两路正向通道的上升沿和下降沿都进行检测;MM440只对A通道的上升沿进行检测,从而实现对速度的检测。
MM440编码器速度检测方式如下图所示:

通道A(上升沿)用来进行速度检测。(t1=t2=t3=t4=t5)
Sinamics G120速度检测方式如下图所示:

通道A,B上升沿(红线)和下降沿(蓝线)用来进行速度检测。(t1=t2=t3=t4=t5)
G120的A,B两个通道都用来进行速度检测。另外,上升沿和下降沿也都用来进行速度检测。这样对于G120来说,通道A,B的上升沿和下降沿都用来进行速度检测。
虽然这种方式用到了更多的沿信号,但这样就提高速度检测的速度和精度,如果占空比或两相的对称性太低就会出现问题。

(t1≠t2=t3=t4≠t5)
在上面的例子中如果只使用通道A的上升沿(红线),也就是MM440的工作方式,效果是好的,这是因为只有通道A的上升沿参与了速度的检测。然而,对于G120来说,缺省的设置是使用了所有的沿信号。软件假定了所有沿信号之间的距离是相等的。这样在对速度反馈的检测上就产生了偏差,这样就会造成输出转速的波动。极端情况下还会产生F0090的故障。G120参数P0405的第6位和第7位用来选择哪个沿用于编码器。
G120用于速度检测的边沿选择:P0405
|
Bit 7 |
Bit 6 |
描述 |
|
0 |
0 |
缺省设置:在所有的速度范围内,编码器的所有边沿都用于速度检测 。 在低速范围内,这种方式下速度值更新的最快。 使用这种方式,如果编码器的占空比不相等,速度检测的精度将会有所下降。 |
|
0 |
1 |
在所有的速度范围内,只有通道A脉冲的上升沿被用来进行速度的检测。对于没有相等占空比的编码器,这种方式将给出最为精确的速度检测。 使用这种方式,在低速时速度检测的更新时间将会延长,因为只有一个编码器的沿被用来进行速度检测。 |
|
1 |
1 |
在高速(>1Hz)时,是使用通道A脉冲的上升沿用来进行速度的检测。对于没有相等占空比的编码器,这种方式将给出最为精确的速度检测。 在低速时(<1Hz),编码器的所有沿都被用来进行速度检测。这种方式在低速时保证了最快的速度更新时间,但是当编码器占空比不同时,精度会有所降低。 |
|
1 |
0 |
与 0 – 0相同。 |
展开
 询盘信息
询盘信息
必填*
-
姓名:

-
联系手机:
-
需求量:
选填
-
固话电话:
-
联系邮箱:
-
所在单位:
所咨询的内容:

我想了解:《供应西门子Siemens 6DD1611-0AE0 MM21》的详细信息.请商家尽快与我联系。
完成
咨询内容
完成
完成
