 首页
首页
0/100

西门子3RK7137-6SA00-0BC1
来自:长沙玥励自动化设备有限公司
面议
发布时间:2018-5-8
关注次数:114
产品参数
商品详情
西门子3RK7137-6SA00-0BC1 西门子3RK7137-6SA00-0BC1 西门子3RK7137-6SA00-0BC1
SIMATIC ET 200SP 通信模块 CM AS-i 接口主站 ST 符合 As-i 技术数据 V3.0
| 产品 | ||||||||||||||||||||||||||||||||||
| 商品编号(市售编号) | 3RK7137-6SA00-0BC1 | |||||||||||||||||||||||||||||||||
| 产品说明 | SIMATIC ET 200SP 通信模块 CM AS-i 接口主站 ST 符合 As-i 技术数据 V3.0 | |||||||||||||||||||||||||||||||||
| 产品家族 | SIMATIC ET 200SP (CM AS‑i Master ST) | |||||||||||||||||||||||||||||||||
| 产品生命周期 (PLM) | PM300:有效产品 | |||||||||||||||||||||||||||||||||
| 价格数据 | ||||||||||||||||||||||||||||||||||
| 价格组 / 总部价格组 | XH / 42C | |||||||||||||||||||||||||||||||||
| 列表价(不含增值税) | 显示价格 | |||||||||||||||||||||||||||||||||
| 您的单价(不含增值税) | 显示价格 | |||||||||||||||||||||||||||||||||
| 金属系数 | 无 | |||||||||||||||||||||||||||||||||
| 交付信息 | ||||||||||||||||||||||||||||||||||
| 出口管制规定 | AL : N / ECCN : EAR99 | |||||||||||||||||||||||||||||||||
| 工厂生产时间 | 2 天 | |||||||||||||||||||||||||||||||||
| 净重 (Kg) | 0.06 Kg | |||||||||||||||||||||||||||||||||
| 产品尺寸 (W x L X H) | 未提供 | |||||||||||||||||||||||||||||||||
| 包装尺寸 | 68.00 x 77.00 x 32.00 | |||||||||||||||||||||||||||||||||
| 包装尺寸单位的测量 | MM | |||||||||||||||||||||||||||||||||
| 数量单位 | 1 件 | |||||||||||||||||||||||||||||||||
| 包装数量 | 1 | |||||||||||||||||||||||||||||||||
| 其他产品信息 | ||||||||||||||||||||||||||||||||||
| EAN | 4011209918047 | |||||||||||||||||||||||||||||||||
| UPC | 887621293673 | |||||||||||||||||||||||||||||||||
| 商品代码 | 85371098 | |||||||||||||||||||||||||||||||||
| LKZ_FDB/ CatalogID | CC-IC10 | |||||||||||||||||||||||||||||||||
| 产品组 | 5321 | |||||||||||||||||||||||||||||||||
| 原产国 | 德国 | |||||||||||||||||||||||||||||||||
| Compliance with the substance restrictions according to RoHS directive | RoHS 合规开始日期: 2012.07.18 | |||||||||||||||||||||||||||||||||
| 产品类别 | A: 问题无关,即刻重复使用 | |||||||||||||||||||||||||||||||||
| 电气和电子设备使用后的收回义务类别 | 没有电气和电子设备使用后回收的义务 | |||||||||||||||||||||||||||||||||
| 分类 | ||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||
1 系统配置
1.1软硬件配置
(1)配备支持USS通信功能控制单元G120变频器,异步电机。本例中,使用的控制单元是CU240E-2,固件版本V4.5。
(2)S7-200 PLC,与PC的连接电缆。本例中,使用的是CPU224 XP CN,连接电缆使用CP5512。
(3)安装了Step7 Micro-Win V4.0软件和USS协议库的PC机。本例中,使用的是Step7 Micro-Win V4.0 SP6,USS协议库为2.3版本。
西门子标准库指令(包含USS协议库)下载地址:http://www.ad.siemens.com.cn/download/searchResult.aspx?searchText=S0010
在进行PLC编程之前,请确认USS协议库已经安装,如图1-1。
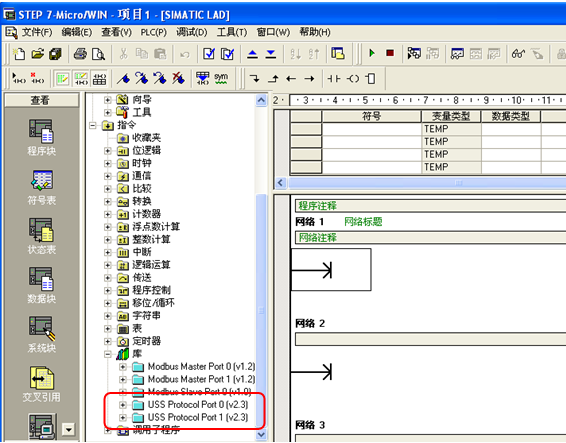
图1-1
2.2 S7-200与控制单元间的接线

图1-2
CU240E-2的控制端子排如图1-2,从控制单元底部看,共有5个接线端子,其中2号端子为RS485P,3号端子为RS485N,用于通信数据的发送和接收。

图1-3
S7-200作为USS通信主站,其通信端口和变频器从站的接线如图1-3。在通信网络的首、末端需要使用终端电阻。
对于S7-200,需要在通信端口端子3和8之间,连接一阻值为120欧姆的电阻。
对于变频器,把通信网络末端的CU240E-2终端电阻拨码开关拨到ON位置即可(位置在图1-1中,标号⑨);中间位置的CU240E-2,终端电阻拨码开关必须拨到OFF位置。
本例中,S7-200(CPU224 XP CN)使用通信端口Port 0和变频器进行通信。
2 变频器设置
2.1 地址设置
变频器的USS通信地址可以通过控制单元上的总线地址拨码开关(位置在图1-1中,标号⑤)进行设置。当地址拨码开关的位置都为OFF时,也可用过参数P2021进行设置。
2.2 参数设置
除了设置地址之外,还需要对变频器一些基本的通信参数进行设置,才可以进行USS通信,如表2-1所示:
表2-1
| 参数 | 描述 |
| P0015 = 21 |
变频器宏程序。 15:通过现场总线控制 设置方法:P10=1 → P15=21 → P10=0 |
| p2030 = 1 |
现场总线协议选择 1:USS协议 |
| p2020 |
现场总线波特率 设置范围是 4800 bit/s … 187500 bit/s,出厂为 19200 bit/s 本例使用:6(9600) |
| P2021 |
USS地址(在地址拨码开关都为OFF时,才有效) 本例使用:3 |
| p2040 |
过程数据监控时间 指没有收到过程数据时发出报警的延时。 注:必须根据从站数量、总线波特率加以调整,出厂设置为 100 ms。 |
3 PLC编程
3.1使用USS协议的初始化模块初始化S7-200的PORT0端口

图3-1
功能块说明:
注: 此处以及下文的“功能块说明”仅介绍了功能块内的主要管脚
功能,未说明的管脚功能,请参考Step7 Micro-Win V4.0软件的
帮助文件。
输入:
EN:使能。每次改变通讯状态都应该执行一次初始化指令,EN信号应该通过脉冲激活。本例中,Port 0端口一直作为USS通信端口使用,因此使用SM0.1初始化一次即可。
Mode:1——为端口0指定USS协议,并启用该协议。
Baud:波特率,应与变频器定义的波特率一致。本例中,使用9600。
Active:激活驱动器地址,参考图3-2。本例中,使用2#1000,即激活驱动器地址3。
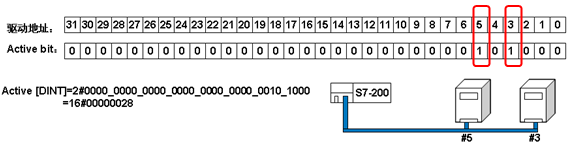
图3-2 激活驱动器地址3和5
3.2 使用USS_CTRL功能块控制变频器的运行
3.2.1 USS_CTRL功能块编程
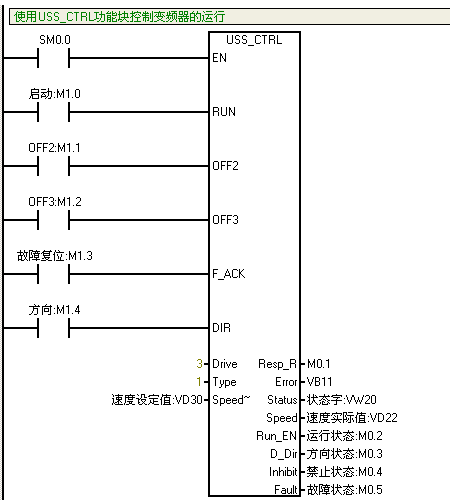
图3-3
功能块说明:
输入:
EN:通常情况总是激活。
RUN:启动变频器。0-停止;1-启动。
OFF2:自由停车。0-正常;1-自由停车。
OFF3:快速停止。0-正常;1-快速停止。
F _ACK:故障复位。通过上升沿对变频器进行故障复位。
DIR:运行方向。0-正转;1-反转
Drive:变频器USS地址,0-31。本例使用3。
Speed~:速度设定值,通过百分比进行设定,范围 -200.0~~200.0%。
输出:
Error:错误代码。有关错误代码说明,请参考表3-1。
Status:变频器返回的状态字。有关G120变频器状态字,请参考《参数手册》有关r52参数的说明。
Speed:变频器返回的速度实际值的百分比。
Run_EN:变频器运行状态。0-停止;1-运行。
D_Dir:变频器运行方向。0-正转;1-反转。
Inhibit:变频器禁止位状态。0-正常;1-禁止。
Fault:变频器故障状态。0-正常;1-故障。
表3-1
| 错误代码 | 说明 |
| 0 | 无错。 |
| 1 | 驱动器不应答。 |
| 2 | 检测到来自驱动器的应答中检验和错误。 |
| 3 | 检测到来自驱动器的应答中校验错误。 |
| 4 | 来自用户程序的干扰造成错误。 |
| 5 | 尝试非法命令。 |
| 6 | 提供非法驱动器地址。 |
| 7 | 未为USS协议设置通讯端口。 |
| 8 | 通讯端口正在忙于处理指令。 |
| 9 | 驱动器速度输入超出范围。 |
| 10 | 驱动器应答长度不正确。 |
| 11 | 驱动器应答第一个字符不正确。 |
| 12 | 驱动器应答中的字符长度不受USS指令支持。 |
| 13 | 错误的驱动器应答。 |
| 14 | 提供的DB_Ptr地址不正确。 |
| 15 | 提供的参数号不正确。 |
| 16 | 选择了无效协议。 |
| 17 | USS激活,不允许改动。 |
| 18 | 指定了非法波特率。 |
| 19 | 无通讯:驱动器未设为激活。 |
| 20 | 驱动器应答中的参数或数值不正确或包含错误代码。 |
| 21 | 返回一个双字数值,而不是请求的字数值。 |
| 22 | 返回一个字数值,而不是请求的双字数值。 |
3.2.2 分配库存储区,编译,下载。
在编译程序之前,选择 “程序块” ->“ 库”, 右键点击,选择“库存储区”。在弹出的对话框中点击 “建议地址” 选择V存储区的地址后点击 “OK”退出。如图3-4。
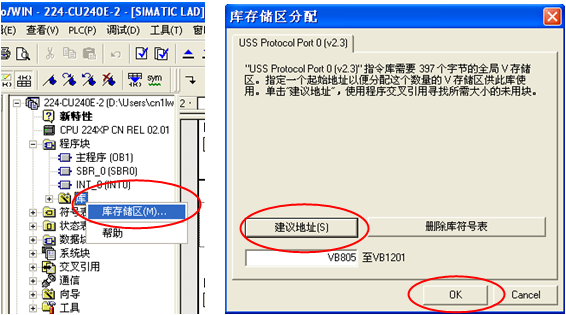
图3-4
分配库存储区之后,编译并下载。
3.2.3 控制变频器运行。
此时,即可通过USS通信,控制变频器的运行。
例,
打开状态表监控,如图3-5。
M1.0为变频器的启停控制位,初始值为0,从0强制为1后,变频器即可运行。
VD30为变频器的速度设定值,强制为20.0后,变频器将以20%的速度运行。
VW20,VD22分别为变频器返回的状态字和速度实际值。

图3-5
3.3 读写参数
根据参数的不同数据类型,需要使用不同的功能块进行变频器参数的读写。下文中,将通过举例进行介绍。
注:目前,USS协议库的参数读写功能块,仅适用于读写参数号在3999以下的参数。对于参数号在4000以上的参数,如果要进行读写,可参考《操作说明》,7.4.2.4节,使用自由口编程的方式进行读写,在此不作介绍。
G120《操作说明》下载地址:30563628
3.3.1 使用USS_RPM_R功能块读取浮点型参数

图3-6
功能块说明:
输入:
EN:需要读取参数时激活。
XMT_~:操作请求。使用上升沿激活。
Drive:变频器USS地址。本例中,使用3。
Param:要读取的参数号。本例中,读取参数r27(输出电流实际值)。
Index:参数下标。本例中,r27无下标,必须定义为下标0。
输出:
Value:返回的参数值。
编译、下载之后,打开状态表监控,如图3-7。把M6.0,从0强制为1后,VD560返回值为0.33。即r27=0.33。

图3-7
3.3.2 使用USS_WPM_R功能块修改浮点型参数

图3-8
功能块说明:
输入:
EN:需要修改参数时激活。
XMT_~:操作请求。使用上升沿激活。
EEPR~:写入EEPROM存储器。(注:对CU240B/E-2无效)
Drive:变频器USS地址。本例中,使用3。
Param:要修改的参数号。本例中,修改参数P1120(斜坡上升时间)。
Index:参数下标。本例中,修改下标0。
Value:要写入的参数值。
编译、下载之后,打开状态表监控,如图3-9。把M7.0,从0强制为1后,VD630的当前值15.0将会写入参数P1120的下标0中,即P1120.0=15.0。

图3-9
3.3.3 使用USS_RPM_W功能块读取U16(无符号16位)类型参数
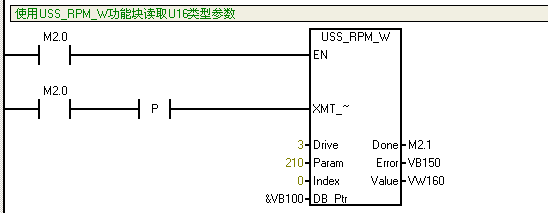
图3-10
功能块说明:
输入:
EN:需要读取参数时激活。
XMT_~:操作请求。使用上升沿激活。
Drive:变频器USS地址。本例中,使用3。
Param:要读取的参数号。本例中,读取参数P210(电源电压)。
Index:参数下标。本例中,P210无下标,必须定义为下标0。
输出:
Value:返回的参数值。
编译、下载之后,打开状态表监控,如图3-11。把M2.0,从0强制为1后,VDW160返回值为440。即P210=440。
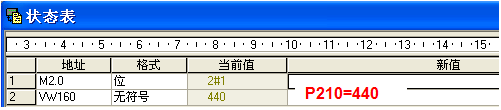
图3-11
3.3.4 使用USS_WPM_W功能块修改U16(无符号16位)类型参数
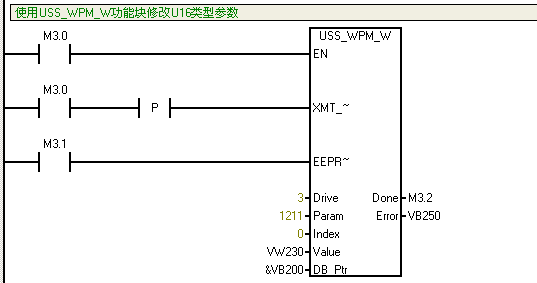
图3-12
功能块说明:
输入:
EN:需要修改参数时激活。
XMT_~:操作请求。使用上升沿激活。
EEPR~:写入EEPROM存储器。(注:对CU240B/E-2无效)
Drive:变频器USS地址。本例中,使用3。
Param:要修改的参数号。本例中,修改参数P1211(自动重启尝试次数)。
Index:参数下标。P1211无下标,必须定义为下标0。
Value:要写入的参数值。
编译、下载之后,打开状态表监控,如图3-13。把M3.0,从0强制为1后,VW230的当前值2将会写入参数P1211的下标0中,即P1211=2。

图3-13
3.3.5 使用USS_RPM_D功能块读取U32(无符号32位)类型参数

图3-14
功能块说明:
输入:
EN:需要读取参数时激活。
XMT_~:操作请求。使用上升沿激活。
Drive:变频器USS地址。本例中,使用3。
Param:要读取的参数号。本例中,读取参数P730(DO0功能)。
Index:参数下标。本例中,P730无下标,必须定义为下标0。
输出:
Value:返回的参数值。
编译、下载之后,打开状态表监控,如图3-15。把M4.0,从0强制为1后,VD360返回值为16#0034FC03。即P730=52.3。

图3-15
注:16#0034FC03到52.3的转换说明
当使用读写参数的功能块时,类似于P730=52.3这样的BICO连接参数,需要经过如下转换:
高字,0034(16进制)= 52(十进制);
低字中的高字节,对于CU240B/E-2,规定为FC(16进制);
低字中的低字节,03(16进制)= 3(十进制)。
所以, 0034FC03(16进制)= 52.3(十进制)
3.3.6 使用USS_WPM_D功能块修改U32(无符号32位)类型参数
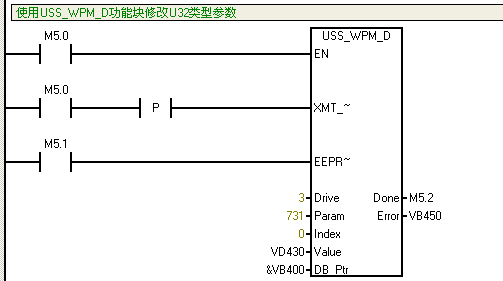
图3-16
功能块说明:
输入:
EN:需要修改参数时激活。
XMT_~:操作请求。使用上升沿激活。
EEPR~:写入EEPROM存储器。(注:对CU240B/E-2无效)
Drive:变频器USS地址。本例中,使用3。
Param:要修改的参数号。本例中,修改参数P731(DO1功能)。
Index:参数下标。本例中,P731无下标,必须定义为下标0。
Value:要写入的参数值。
编译、下载之后,打开状态表监控,如图3-17。把M5.0,从0强制为1后,VD430的当前值16#0034FC0C将会写入参数P731中,即P731=52.12。有关0034FC0C(16进制)到52.12的转换,请参考3.5.1节中的注释。

图3-17
关键词
G120,CU240B-2,CU240E-2,USS
PROFINET IO快速启动使用入门
推荐文档: 西门子工程师推荐本文档!
-
文献
-
涉及产品
1 PROFINET IO快速启动
1.1 简介
PROFINET 的“快速启动”功能可实现在PROFINET IO 应用中,部件或工具及其 IO 设备(分布式 I/O)随工艺要求进行更换。 通过此快速启动功能,重新启动的预定进程之间的等待时间(几秒钟)缩短为最小。 这加速了具有可移动 IO 设备(分布式 I/O)的生产进程,并能大幅提高生产能力。参见图 1机器人机械手臂。

图 1机器人机械手臂
快速启动是指在具有 RT 和 IRT 通讯的 PROFINET IO 中用于加速 IO 设备(分布式
I/O)启动速度的 PROFINET 功能。它缩短了相应组态的 IO 设备(分布式 I/O)所需要
的时间,以便实现下列情况中快速的循环用户数据交换:
- ® 设备电源恢复后
- ® 该站已经返回后
- ® 激活分布式I/O设备
通过PROFINET快速启动可以缩短分布式I/O的通讯准备就绪的时间到最小500毫秒。 并且该功能适用于RT或IRT。PROFINET快速启动的时间长短依赖于以下几点:
- ® 所使用分布式I/O设备
- ® 分布式I/O设备的IO结构
- ® 分布式I/O设备所用的模块
- ® 所使用IO控制器
- ® 所使用的交换机
- ® 端口设置
- ® 电缆
标准的启动功能,默认状态下的端口连接组态都采用“Automatic settings”的设置。而且使用平行接的电缆来连接IO设备。当一个分布式IO设备返回时,启动过程开始。首先,PROFINET设备端口的自协商和自交叉功能确定传输工作方式的时间大约3秒钟。然后IO控制器会对IO设备进行DCP识别,判断是否存在Device name。如果Device name不存在,IO控制器由于无法识别IO设备,通讯会无法建立。如果Device name存在,会进行ARP识别IP地址是否存在。如果IP地址不存在,那么IO控制器会根据硬件组态的IP地址信息,通过DCP协议给该IO设备设置IP地址。IO控制器会再次发送ARP请求确定IP地址的唯一性。如果存在IP地址,IO控制器开始与IO设备建立连接,写数据记录,控制后数据交换开始。从ARP开始到通讯的建立的时间大约为2秒多钟。所以(如果IP地址存在)标准启动过程的时间大约5秒钟。上述描述仅仅考虑连接较少的IO设备和交换机,特殊的IO设备(例如IWLAN/PB LINK,需要更多的写数据记录的步骤)和交换机的S&F的时间并没有考虑。可见标准的IO设备的启动时间主要花费在自协商和自交叉模式以及IO的连接建立过程。
快速启动则要求禁止端口自协商和自交叉模式,并优化了IO的连接建立过程。在PROFINET IO系统中实现快速启动功能,首先要求分布式IO设备支持快速启动功能,例如ET200S PN从4.0版本开始即支持该功能。IO控制器也要支持该功能,CPU从Firmware版本2.6开始支持快速启动。一个PROFINET IO系统中最多可以组态32个快速启动设备,但是最多只能一次激活8个IO设备实现快速启动。
对于快速启动的设备以及相邻设备的相连端口必须禁止自协商和自交叉模式,然后根据所使用的设备选择交叉或平行接的网线。对于连接相同类型的设备端口应该使用交叉接的网线,例如交换机之间或终端设备之间。参考图 2 相同类型设备之间的使用交叉接的网线。而对于不同类型设备之间则使用平行接的网线,例如交换机和终端设备之间。参考图 3 不同类型设备之间的使用交叉接的网线。新的分布式IO设备,例如ET200S的6ES7 151-3BA23-0AB0以及后续版本,其中第一个端口作为终端设备端口,这样连接不再需要交叉接的电缆只需要平行接的电缆即可。参考图 4 ET200S使用平行接网线串联。

图 2 相同类型设备之间的使用交叉接的网线

图 3 不同类型设备之间的使用交叉接的网线

图 4 ET200S使用平行接网线串联
如果希望实现 500 ms 的最短启动时间,必须执行下列操作:
- ® 在 STEP 7 中组态 PROFINET 的快速启动功能
- ® IO 设备(分布式 I/O)上的端口设置
- ® 布线取决于互连的 PROFINET 设备
- ® 用户程序中的操作,需要组态Docking站和Docking单元和编写SFC12。
2 PROFINET IO FSU组态
2.1 举例
PROFINET IO系统中, CPU319-3PN/DP作为IO控制器,连接SCALANCE X400交换机,机器人手臂连接切换的两个工具都为ET200S。例子参考图 5 快速启动例子。其中通过SCALANCE X414-3E的9.1端口使用平行接的网线连接两台相互切换ET200S的端口1。

图 5 快速启动例子
本例中使用硬件和软件列表如下:
| PROFINET设备 | 订货号 | 版本 | 数量 |
| CPU319-3PN/DP | 6ES7 318-3EL00-0AB0 | 2.8 | 1 |
| SCALANCE X400 | 6GK5 414-3FC00-2AA2 | 2.3 2 | 1 |
| ET200S | 6ES7 151-3BA23-0AB0 | 6.0 | 2 |
| PM-E | 6ES7 138-4CA01-0AA0 | 2 | |
| DO | 6ES7 132-4BB01-0AB0 | 2 | |
| DI | 6ES7 131-4BD01-0AB0 | 1 | |
| RJ45 Plug | 6GK1 901-1BB10-2AA0 | 4 | |
| 网线 | 6XV1840-2AH10 | ||
| Step7 | 5.4+SP5 |
2.1.1 硬件组态
根据实际网络设备,在Step7中进行硬件组态,参考图 6 硬件组态。
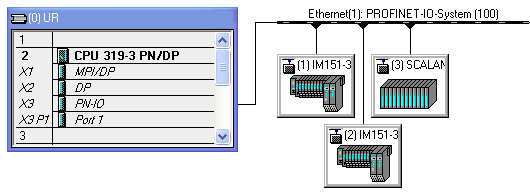
图 6 硬件组态
在HW组态画面中,点击PROFINET1号站IM151-3,然后双击0号槽号的X1子槽的PN-IO,弹出PN-IO的属性对话框。使能“Prioritized startup”。点击OK,关闭该对话框。同样方式,给2号站ET200S IM151-3使能快速启动。参考图 7两台ET200S使能快速启动。

图 7两台ET200S使能快速启动
在HW组态画面中,点击PROFINET1号站IM151-3,然后双击0号槽的X1P1子槽的Port1,弹出PN-IO-Port1的属性对话框。选择传输介质和双工模式为“TP/ITP 100Mbps full duplex”,并使能“Disable autonegotiation”,这样就禁止了自协商和自交叉功能。点击OK,关闭该对话框。同样方式,给2号站的ET200S IM151-3的端口1设置同样的方式。参考图 8设置两台ET200S的端口1属性。

图 8设置两台ET200S的端口1属性
对Docking站进行组态。在HW组态画面中,点击PROFINET3号站SCALANCE X414-3E,然后双击9号号槽的X1P1子槽的Port1,弹出PN-IO-Port1的属性对话框。选择传输介质和双工模式为“TP/ITP 100Mbps full duplex”,并使能“Disable autonegotiation”,这样就禁止了自协商和自交叉功能。点击OK,关闭该对话框。参考图 9设置SCALANCE X414-3E的端口9.1属性。

图 9设置SCALANCE X414-3E的端口9.1属性
然后选择SCALANCE X414-3E的端口9的PN-IO-Port1的属性对话框的Topology页面,在Partner Port选项,选择“Alternating partner port”。参考图 10 选择“Alternating partner port”。

图 10 选择“Alternating partner port”
然后还在该对话框中,通过点击Add…按钮,分别加入切换工具的两个ET200S的端口1。参考图 11 加入替换的ET200S端口1。点击OK结束,这样就组态完Docking站。

图 11 加入替换的ET200S端口1
查看组态后的拓扑组态信息。使用鼠标右键点击PROFINET总线Ethernet(1): PROFINET-IO-System(100),选择“PROFINET IO Topology….”。参考图 12选择PROFINET IO拓扑。
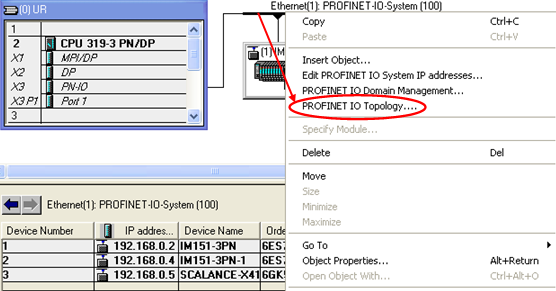
图 12选择PROFINET IO拓扑
弹出拓扑编辑器对话框,选择“Graphic view”可以看见在PROFINET IO系统中的IO设备的连接关系。参考图 13拓扑设备的拓扑连接关系。
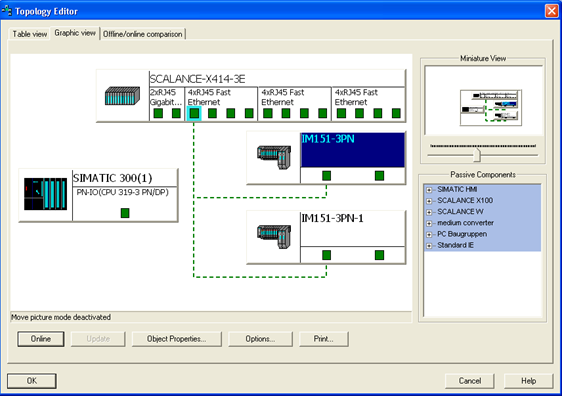
图 13拓扑设备的拓扑连接关系
对于PROFINET IO组态通讯,分配Device name等,请参考网上课堂的 72325620。硬件组态完毕后,编译保存并下载到PLC中。
2.1.2 软件组态
打开OB1,在OB1的起始位置编写SFC12,用于激活和禁止IO设备。其中LADDER为16进制ET200S的诊断地址。参考图 14 编写SFC12。然后保存下载OB1到PLC中。

图 14 编写SFC12
这样两个工具之间就可以实现切换,当一个设备禁止时,另外一个设备激活。需要注意的是每次执行SFC12不同的Mode任务时(例如Mode=1,激活IO设备;mode=2,禁止IO设备),REQ必须重新置1。当使用Mode=3或者4时,需要在PLC中下载OB86,否则工具在切换过程中PLC会停止。
当通过CP343-1实现快速启动时,不能使用SFC12。
西门子3RK7137-6SA00-0BC1 西门子3RK7137-6SA00-0BC1 西门子3RK7137-6SA00-0BC1
展开
 询盘信息
询盘信息
必填*
-
姓名:

-
联系手机:
-
需求量:
选填
-
固话电话:
-
联系邮箱:
-
所在单位:
所咨询的内容:

我想了解:《西门子3RK7137-6SA00-0BC1》的详细信息.请商家尽快与我联系。
完成
咨询内容
完成
完成
