 首页
首页

0/100

湖南 长沙 西门子 6ES7157-1AB00-0AB0
来自:长沙玥励自动化设备有限公司
面议
发布时间:2018-6-4
关注次数:170
产品参数
商品详情
西门子 6ES7157-1AB00-0AB0 西门子 6ES7157-1AB00-0AB0 v 西门子 6ES7157-1AB00-0AB0
SIMATIC ET 200AL, PROFINET 接口模块 IM 157-1 PN,防护方式 IP67
|
建议同时购买:

SIMATIC ET 200SP, 基础单元 BU15-P16+A0+2B, 类型 A0 的基础单元, 直插式端子, 不带 AUX 端子, 已向左桥接, 宽x高:15x 117mm

SIMATIC ET 200SP, 基础单元 BU15-P16+A0+2D, 类型 A0 的基础单元, 直插式端子, 不带 AUX 端子, 新的负载组, 宽x高:15x 117mm

SIMATIC ET 200SP, 模拟式输出端模块, 模拟输出 4XU/I 标准型, 适合用于 A0 类型的基座单元,A1, 颜色代码 CC00, 模块诊断,16 位,+/-0.3%

SIMATIC ET 200SP, PROFINET IM 捆绑包, IM 155-6PN ST, 最多 32 外围模块 和 16 ET 200AL 模块, Single Hot SWAP, 捆绑包由以下部分组成: 接口模块 (6ES7155-6AU01-0BN0), 服务器模块 (6ES7193-6PA00-0AA0), 总线适配器 BA 2个RJ45 (6ES7
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
新型ET200S FC使用的固件版本是V3.0,这是 SINAMICS G120 的固件平台。除了功能有所改进以外,还增加了新的功能。能够通过 Profidrive 4.0 行规控制访问 ET 200S FC 变频器。而且ET200S FC变频器执行标准报文1,不再需要使用 FB100 通信功能块;不再具有参数通道,可以使用 Profidrive 4.0 的非循环数据集 (DS47) 读取变频器中的参数或向其中写入参数。本文主要通过一个示例介绍对ET200S FC(Firmware V3.0)进行参数读写的方法,并不涉及使用软件STARTER调试ET200S FC的过程。
1 新型ET200S FC的订货信息
新型ET200S FC可通过指定下列订货号[MLFB]订购控制模块和功率单元,注意控制单元和功率单元必须都为新型的才可以组合使用。
| 订货号 | 描述 |
| 6SL3244-0SA00-1AA1 | 控制模块 ICU24 |
| 6SL3244-0SA01-1AA1 | 控制模块 ICU24F |
| 6SL3225-0SE17-5UA1 | 功率单元 IPM25 750 W |
| 6SL3225-0SE22-2UA1 | 功率单元 IPM25 2.2 kW |
| 6SL3225-0SE24-0UA1 | 功率单元 IPM25 4.0 kW |
表1 ET200S FC控制模块和功率单元订货号
2 参数读写示例
2.1 项目要求
本示例是介绍连接在PROFINET总线上的ET200S FC的参数读写,因此对STEP7软件和接口模块硬件的版本有些要求。
2.1.1 使用软件
需要STEP7 V5.4 SP4或以上版本,如果在STEP 7 硬件组态中找不到时,需要在线更新硬件或安装硬件升级包HSP2023 V1.2 。
2.1.2 使用的接口模块
IM151-3 PN ST (6ES7-151-3AA23-0AB0)版本号V6.0以上
2.2 硬件配置
硬件的配置大致分为三个过程
- ® 设置SIMATIC S7 PROFINET IO 接口
- ® 配置ET200S站
- ® 设置ET200S FC
1、 在CPU的PN IO接口激活PROFINET IO System
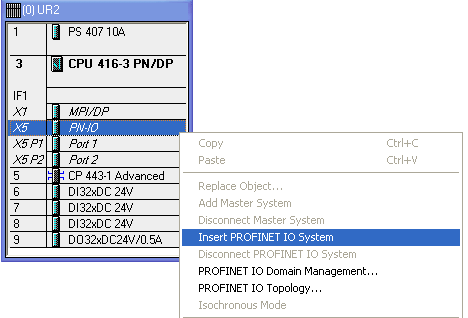
图 1在CPU中插入PROFINET IO System
2、插入ET200S站
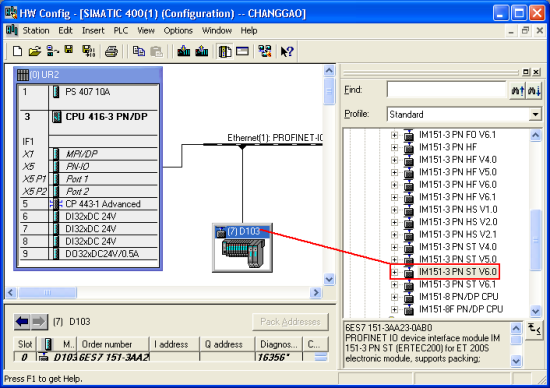
图2在硬件列表中选择ET200S接口模块
3、设置ET200S站的设备名和IP地址
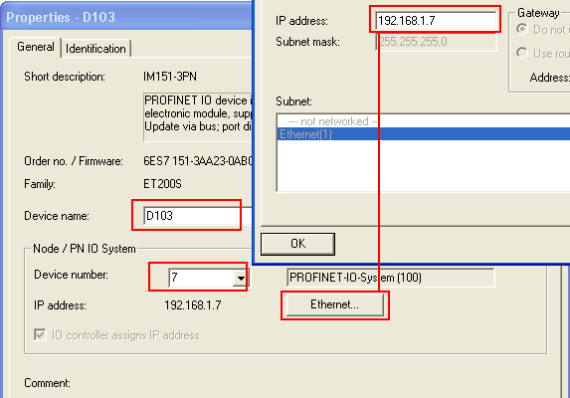
图3修改IO设备名和IP地址
4、将ET200S FC的控制单元ICU24配置到ET200S站的相应槽号,功率单元不需要配置。
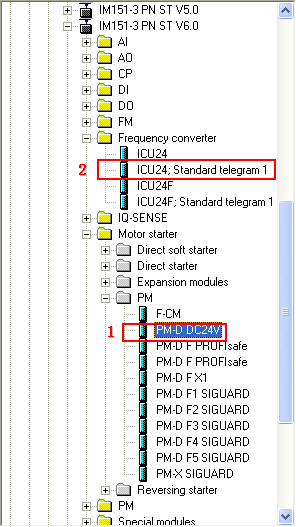
图 4 在硬件列表中选择电源和ET200S FC的控制单元ICU
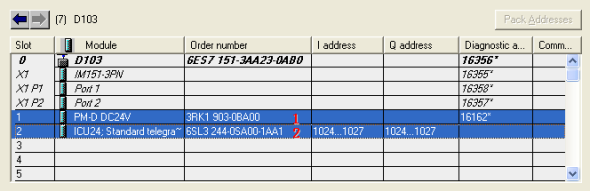
图 5 在ET200S站的槽中插入电源模块和ICU24
5、设置ICU24的输入输出地址,这里采用的是系统默认生成的地址,此地址在后面的参数读写中要使用。
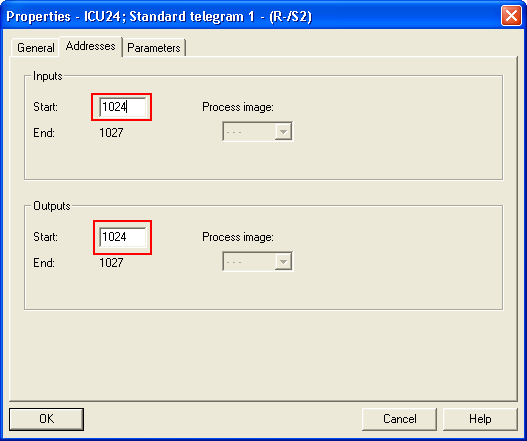
图 6 设定地址
项目配置完成后编译保存,接下来编写程序对参数进行读写。
2.3 读写参数
2.3.1 数据记录47的结构
使用控制器的非循环读写功能,通过 Profidrive 4.0 的数据记录 (DS47) 读取变频器中的参数或向其中写入参数。示例中的ET200S FC连接在PROFINET网络中,所以使用系统功能块SFB52/53进行读写操作。数据记录(DS47)有特殊的结构,主要分为三个部分,报头、参数地址和参数值。参数请求和应答的数据结构和具体含义如下:
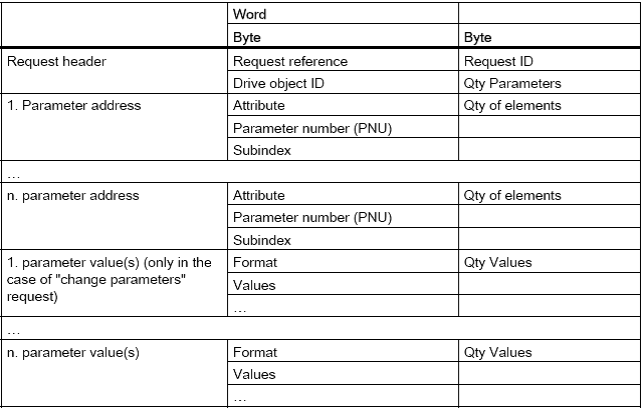
表 2 参数请求数据结构
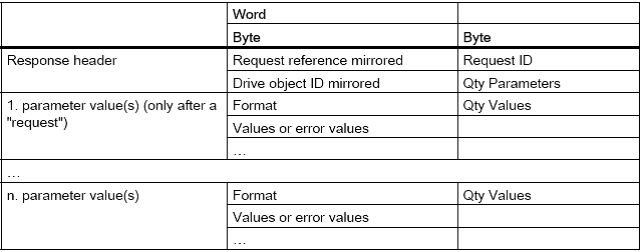
表 3 参数应答数据结构
| 字段 | 数据类型 | 数值 | 说明 |
| (十六进制) | |||
| Request reference | 8位无符号数 | 01….FF | 用于区分对应的请求和应答。主站改变每个新的请求的索引号,从站在相应的应答中返回请求的索引号。 |
| Request ID | 8位无符号数 | 区分请求的类型 | |
| 1 | 读任务 | ||
| 2 | 写任务 | ||
| Drive object ID | 8位无符号数 | 00….FF | 用于区分驱动单元的设备号 |
| Qty Parameters | 8位无符号数 | 01….27 | 访问的参数的个数 |
| Attribute | 8位无符号数 | 访问参数元素的类型 | |
| 10 | 数值 | ||
| 20 | 描述 | ||
| 30 | 文本 | ||
| Qty of elements | 8位无符号数 | 0 | 专用功能 |
| 01….75 | 要访问的参数组中元素数量 | ||
| Parameter number | 16位无符号数 | 0001….FFFF | 访问的参数号 |
| Subindex | 16位无符号数 | 0001….FFFF | 要访问的参数组中第一个元素的下标 |
| Format | 8位无符号数 | 通过数值判断参数值的数据类型 | |
| 2 | 8位整型 | ||
| 3 | 16位整型 | ||
| 4 | 32位整型 | ||
| 5 | 8位无符号数 | ||
| 6 | 16位无符号数 | ||
| 7 | 32位无符号数 | ||
| 8 | 浮点数 | ||
| 40 | 0 | ||
| 41 | 字节 | ||
| 42 | 字 | ||
| 43 | 双字 | ||
| 44 | 错误 | ||
| Qty Values | 8位无符号数 | 00….EA | 说明随后的参数值的个数 |
| Values | 16位无符号数 | 0000….00FF | 参数值 |
表 4 参数请求结构字段说明
| 字段 | 数据类型 | 数值 | 说明 |
| (十六进制) | |||
| Request reference | 8位无符号数 | 01….FF | 应答中返回请求的索引号。 |
| Request ID | 8位无符号数 | 1 | 读操作 |
| 2 | 写操作 | ||
| Drive object ID | 8位无符号数 | 00….FF | 驱动单元的设备号与请求相同 |
| Qty Parameters | 8位无符号数 | 01….27 | 返回的参数的个数 |
| Format | 8位无符号数 | 通过数值判断参数值的数据类型 | |
| 2 | 8位整型 | ||
| 3 | 16位整型 | ||
| 4 | 32位整型 | ||
| 5 | 8位无符号数 | ||
| 6 | 16位无符号数 | ||
| 7 | 32位无符号数 | ||
| 8 | 浮点数 | ||
| 40 | 0 | ||
| 41 | 字节 | ||
| 42 | 字 | ||
| 43 | 双字 | ||
| 44 | 错误 | ||
| Qty Values | 8位无符号数 | 00….EA | 说明随后的参数值的个数 |
| Values | 16位无符号数 | 0000….00FF | 参数值 |
表 5 参数应答结构字段说明
2.3.2 读参数值
为了向ET200S FC写数据记录(DS47),先根据参数请求结构建立数据块DB47。同样,为了从ET200S FC读取数据记录(DS47),根据参数应答结构建立数据块DB48。
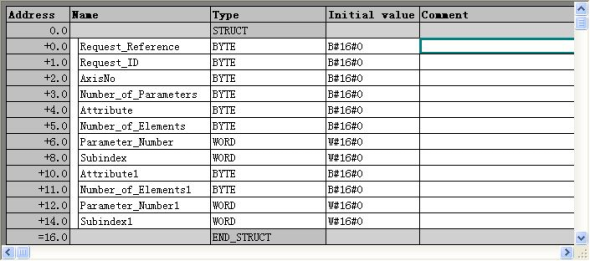
图7 DB47结构
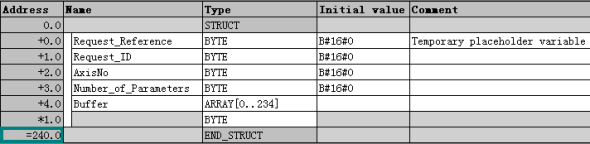
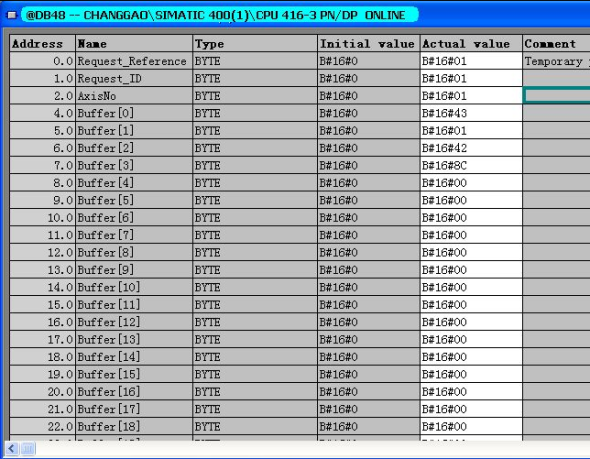
图 8 DB48结构
数据块建立后,按照数据记录的数据结构根据需要对DB47进行赋值,用系统功能块SFB53写数据记录方式将参数读请求发送到ET200S FC然后使用系统功能块SFB52读出应答的数据记录,存储到DB48中。示例中读取参数r0027实际输出电流值。要读取一个参数,应该使Request ID为1,参数号27转换为十六进制后1B。要读取参数值,因此设置Attribute为10。
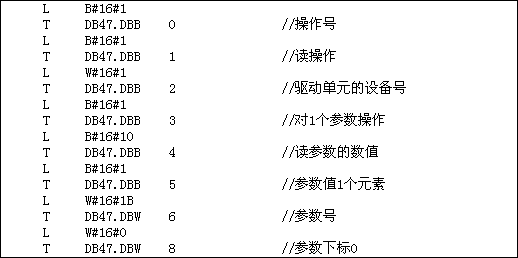
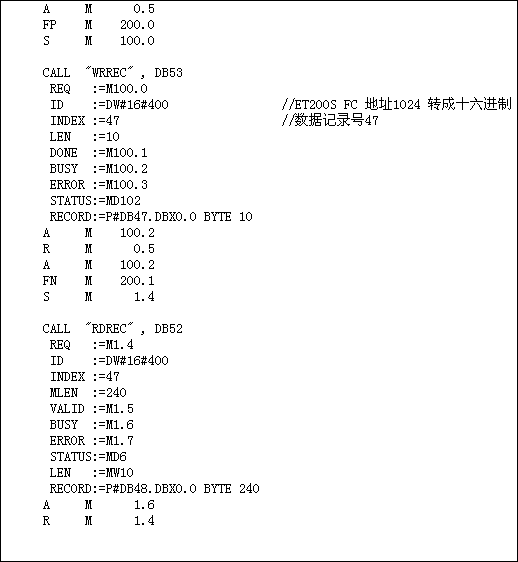
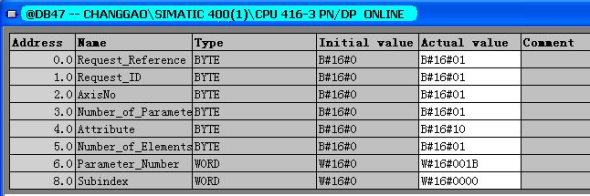
图 9 赋值后的DB47
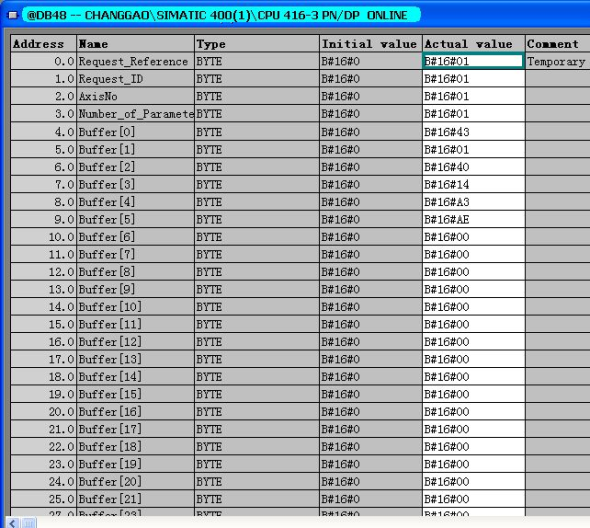
图 10读出参数r0027的实际值存放在DB48中
存放在DB48的数据记录的含义
- ® Request_reference:B#16#01--> 请求和应答之间的对应关系。
- ® Request_ID: B#16#01 --> 读操作的应答。
- ® AxisNo:B#16#01 -> 驱动单元的设备号和请求对应
- ® Number_of_parameters:B#16#01 --> 读一个参数
- ® Buffer[0]:B#16#43 --> 数值的格式为双字
- ® Buffer[1]:B#16#01 --> 有1个数值
- ® Buffer[2]- Buffer[5]:DW#16#4314A3AE --> 转换成浮点数为2.32249,说明实际输出电流为2.32249安培。
2.3.3 写参数值
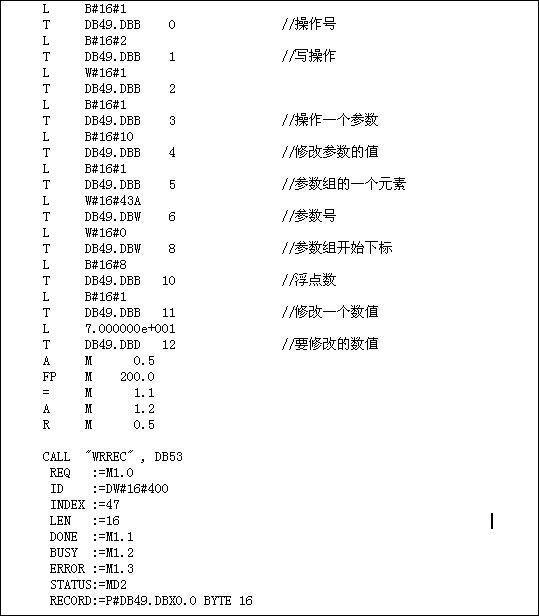
下面说明如何修改参数值,示例中要修改的参数为P1082[0](电机最高运行频率),这是一个参数组,因此要指定修改的下标。修改参数应该使Request ID为2,参数号1082转换为十六进制后43A。要修改参数值,因此设置Attribute为10。同时要修改的这一参数的数据类型是浮点数,因此要设置Format为8。同样,根据参数请求结构建立数据块DB49,由于要修改参数值因此增加了参数值部分。在程序中对DB49中相应数据进行赋值后,调用SFB53写数据记录方式将参数P1082[0]的值由默认值50.0修改为70.0。
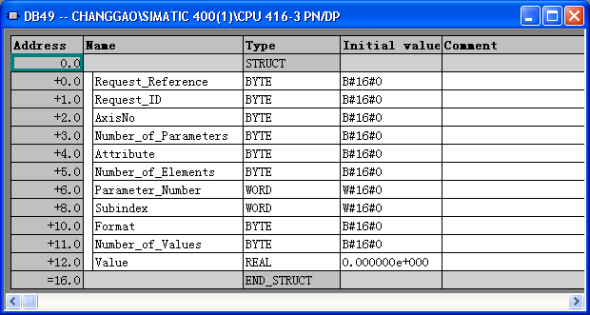
图 11 DB49结构
参数修改完成后,可以通过上一节读参数值的方法将P1082[0]的参数值读出来,见图12,其中字节Buffer[2]- Buffer[5]:DW#16#428C0000 --> 转换成浮点数为70.0,说明参数修改成功。
ET200S 1 步进模板使用入门
ET200S 1 5V/204KHz 步进模板入门
1. 模板介绍
1.1 总览
ET200S 1 步进模板输出脉冲来控制步进电机 ,输出脉冲的数量决定步进电机的运动距离,输出脉冲的频率决定步进电机的速度。
模板订货号: 6ES7138-4DC00-0AB0
1.2 模板参数
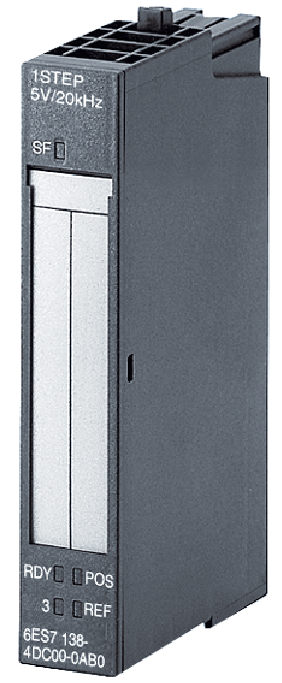
图. 1: 步进电机模板
- 1 通道,可控制1个步进电机
- 数字量输入的参考点开关
- 外部停止或者外部脉冲使能数字输入
- 脉冲和方向信号时RS422的差分输出模式
- 最大输出频率: 204kHZ
- 最大脉冲数: 1048575
- 4 LED 状态指示灯
- 2 操作模式:寻找参考点和增量模式
2. 模板接线
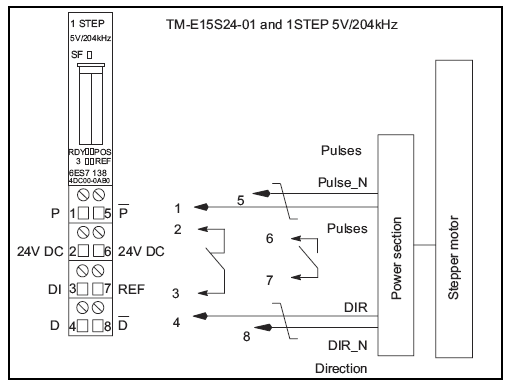
图. 2: 步进模板接线图
- 端子1和5:脉冲差分信号
- 端子4和8:差分输出的方向信号
- 端子2和3:外部停止或者外部脉冲使能数字量输入ID。(功能选择见 4.2 )
- 端子6和7:数字量输入参考点开关
3. 硬件配置
步进模板可以安装在ET 200S接口模板或者 ET200S CPU后面。
本文使用 IM151-7 CPU 为例。

表 1: 软件和硬件配置

图. 3: ET200S 站的配置图
4. 硬件和参数设置
4.1 硬件配置
1) 根据图. 2 和图. 3完成ET200S的接线
2) 打开STEP7,创建一个新项目,并插入一个S7-300站
3) 从硬件目录中选择IM151-7 CPU直接拖拽到站配置窗口
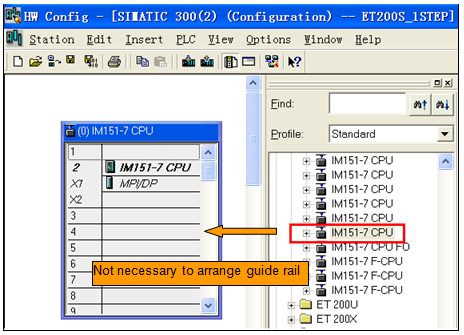
图. 4: 插入IM151-7 CPU
4) 依次在4槽和5槽插入电源模板 PM-E DC24 和步进模块
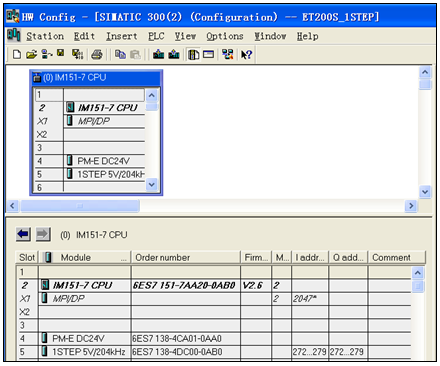
图. 5: 硬件配置
4.2 模板参数配置
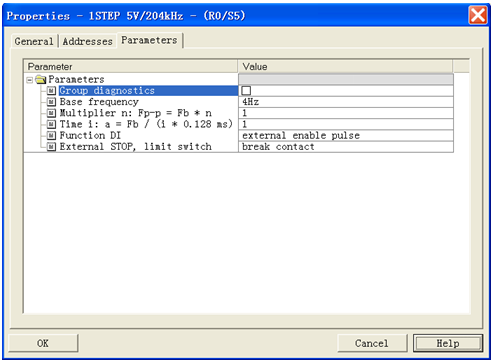
图. 6: 步进模块参数接口
4.2.1 模板参数说明
1) 组诊断:组诊断
2) 基准频率:基准频率,以Hz为单位,标识Fb
3) 增益 n: 增益系数 n,值范围 1-255. 此增益系数决定启动/停止频率 Fss,并且计算公式为: Fss=Fb×n
4) 时间 i: 时间系数 i, 值范围 1-255. 该时间系数以Hz/ms决定加速和减速,计算公式为: a = Fb ×R / (i×0.128 ms)
5)功能 DI: 数字量输入DI 功能可选,可以被组态为外部脉冲输入或者外部停止信号,缺省是外部脉冲且已使能。
6) 外部 Stop, 限位 Stop: 外部 stop, 信号类型停止开关. 接触器触点是常闭信号,以确保该接触器信号,缺省是读取常闭信号。
4.2.2 本文所例参数设置如下
本例参数配置见图. 6.
1) 没有激活组诊断
2) 基准频率 4Hz
3) 乘法系数 1, 启动/停止频率 4Hz
4) 时间系数 1, 加速/ 减速 31.25 Hz/ms
5) 使能外部输入脉冲
6) 外部输入停止和限位信号为常闭类型
5. 编程
5.1 模板输入/输出地址分配
与其它ET200S功能块类似,1STEP步进模板也通过直接读写I/O地址来对模板进行控制和访问的。
反馈信号 (输入), 占用 8 字节. 如表 2 输入地址分配所示。
控制信号 (输出), 占用 8 字节. 如表 3 输出地址分配所示。
有关输入和输出变量分配的详细信息请参阅 ET200S 位置控制和操作手册。链接如下:
/cs/document/9260790?caller=view&lc=en-WW

表 2: 输入地址分配
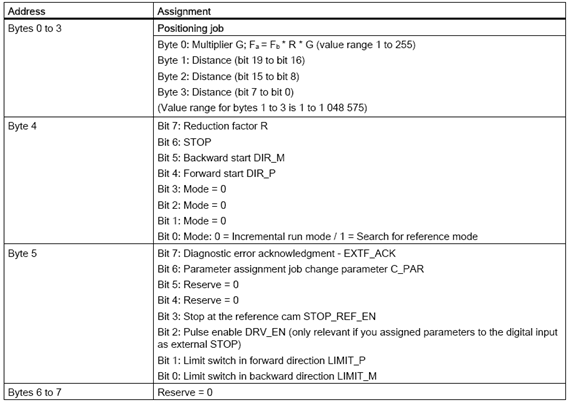
表 3: 输出地址分配
5.2 项目例程
为了更好的实现按位,字节或字对模板进行读写,在梯形图中使用MOVE指令接收输入数据PIB272-PIB279 到MB10-MB17发送MB20-MB27到PQB272-PQB279,对1STEP模板的读写访问均通过MB地址来进行。
1STEP模板地址分配见图. 5

图. 7: 例程编程
6. 模式描述和举例
6.1 Search-for-reference-point 模式
通过执行search-for-reference-point 模式来同步轴, 即.在机械零位和电气零位之间创建连接关系。
6.1.1 Search-for-reference-point 模式
Mode=1
参考点按照常开信号访问
搜寻参考点输出频率 Fss 和 Fa。
Fss 启动停止频率,见章节 4.2.1相关描述。
Fa 输出频率: Fa = Fb ×G × R
Fb: 基准频率. 在1STEP 模板参数中设置。 见章节 4.2.1相关描述。
增益 G: 增益系数 G. 值范围: 1-255, 参见模板输出地址字节: 0。
减少 R:减少系数 R. 模板输出地址字节4的第7位信号,参见表 3.模板输出地址4.7=0, R=1. 模板输出地址 4.7=0, R=0.1.
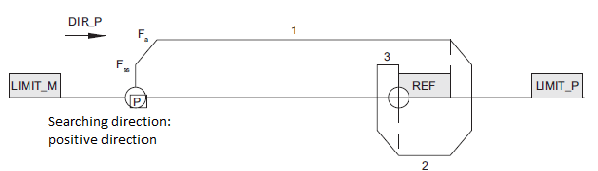
图. 8: 搜寻参考点
6.1.2 search-for-reference-point模式例程
本例模式见图. 8, viz. 搜寻 CW 方向.
-
通过变量表写输出控制变量:

图. 9: 参考点模式控制变量
1) M24.0=1 search-for-reference-point 模式 = 1
2) M25.0=1, M25.1=1: 因为之前的模板参数配置中的限位开关是常闭输入模式,在软件限位信号触发前为信号输入参见章节 4.2.2.
3) M25.2=0: 没有激活软件脉冲使能信号,因之前的模板参数配置中DI已经作为外部脉冲信号使能,内部软件脉冲使能信号在此时不会使用,参见章节 4.2.2.
4) 置位M24.2, 然后复位M24.4 (下降沿有效), 启动search-for-reference-point模式. 输出脉冲频率为 Fa.
5) MB20=1, M24.7=0: 增益系数 G = 1, 减少系数 R = 1, 频率 :
Fa = Fb ×G × R=4Hz×1×1=4Hz。
-
通过变量表读输入状态:

图. 10: 参考点模式变量表
1) M15.2=1: 触发外部脉冲使能信号
2) M15.0 = 1: 驱动使能
3) 之后 search-for-reference point启动, M14.0=1 位置被激活, M15.7=1 位置被执行. 等待参考点开关信号 M15.1.
4) M15.1=1: 参考点信号到达, 寻找参考点已完成 M14.4=1,同步操作完成, M14.2=1,位置到达, M15.3=1, 寻找参考点结束。
6.2 增量模式
增量模式是 1STEP 的主要操作模式. 该操作模式可控制步进电机移动按照设定速度移动到一个指定位置。
6.2.1 增量模式描述
Mode=0
输出脉冲的数量决定步进电机的移动距离,最大值脉冲值为 1048575.
输出脉冲频率决定步进电机速度。
在增量模式下输出频率: Fss, Fa
方向信号作为启动信号。
注意: 步进电机实际位移取决于脉冲数实际速度取决于脉冲频率,这不是在1STEP模板中设置的。
6.2.2 增量模式例程
-
通过变量表写输出控制信号:

图. 11: 在增量模式下的控制变量
1) M24.0=0 增量模式 = 0
2) M25.0=1、M25.1=1: 因之前的已经配置中限位开关信号为常闭输入模式,在软件限位信号触发前为信号输入参见章节 4.2.2。
3) MB20=1, M24.7=0:增益系数 G = 1, 减少系数 R = 1, 输出频率Fa
Fa = Fb ×G × R=4Hz×1×1=4Hz.
4) 脉冲输出数: 通过MB21-23的20 个位信号来存储脉冲数 ,最大值为 0xFFFFF=1048575
MB21 输出脉冲数 (位 16 到位19)
MB22 输出脉冲数 (位 8 到位15)
MB23 输出脉冲数 (位 0 到位 7)
MB21的位 20 到位 23 没有使用
本例中,分配的值为 0 x 100,即. 256 个脉冲。
5) 置位 M24.4, 之后复位 M24.4 (下降沿有效), 启动增量模式 触发CW方向信号开始运动。 -
通过变量表读输入信号:

西门子 6ES7157-1AB00-0AB0 西门子 6ES7157-1AB00-0AB0 西门子 6ES7157-1AB00-0AB0
展开
 询盘信息
询盘信息
必填*
-
姓名:

-
联系手机:
-
需求量:
选填
-
固话电话:
-
联系邮箱:
-
所在单位:
所咨询的内容:

我想了解:《湖南 长沙 西门子 6ES7157-1AB00-0AB0》的详细信息.请商家尽快与我联系。
完成
咨询内容
完成
完成
